18.- Poor man's circuit.
- In the example above, the poor man has no LCD, no I2C module, and no KeyPad.
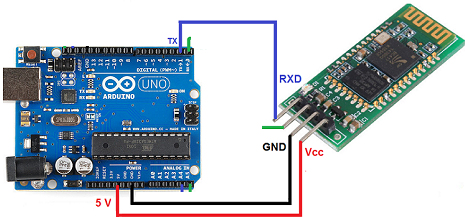
- Remove the wire from terminal 0 of the Arduino.
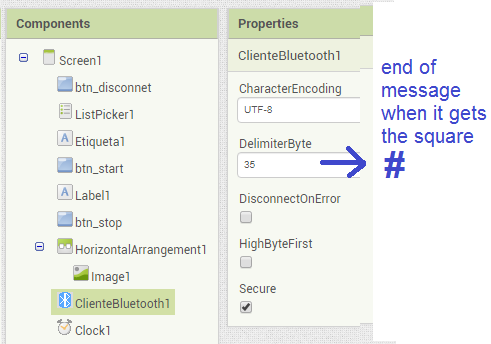
- In Design, DelimiterByte = 35 (it is #)
// Juan A. Villalpando
// http://kio4.com/appinventor/9BA_bluetooth_teclado_LCD.htm
char key = 0;
String clave = "";
void setup() {
Serial.begin(9600);
}
void loop() {
if (Serial.available() > 0) {
key = Serial.read();
clave = clave + key;
if (key == '#') {
Serial.print(clave);
// Example sends: 123#
clave = "";
}
}
}
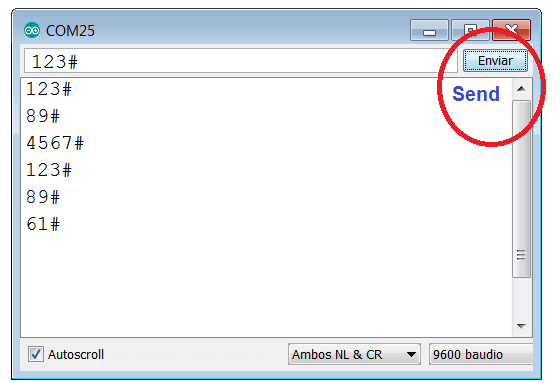
- Now in Serial Monitor write number, 123#