Hello Abraham,
I just write to you in private message, because I see that you are an expert of MIT.
First of all forgive me, because I am French, and I use Google translate.
If you don't understand something because of the translation, let me know!
I am a beginner, and I have a project that I am realizing.
Forgive me if I'm using the wrong terms.
I have a Nikon microscope, motorized on 3 axes: XYZ.
The original control box has given up the ghost... (the Z axis).
I am changing everything (nema 17 motor, Arduino mega control box)
And so I wanted to develop a mobile application to control all of these and add other functions.
I then discovered MIT APP, and I started to learn how to use it.
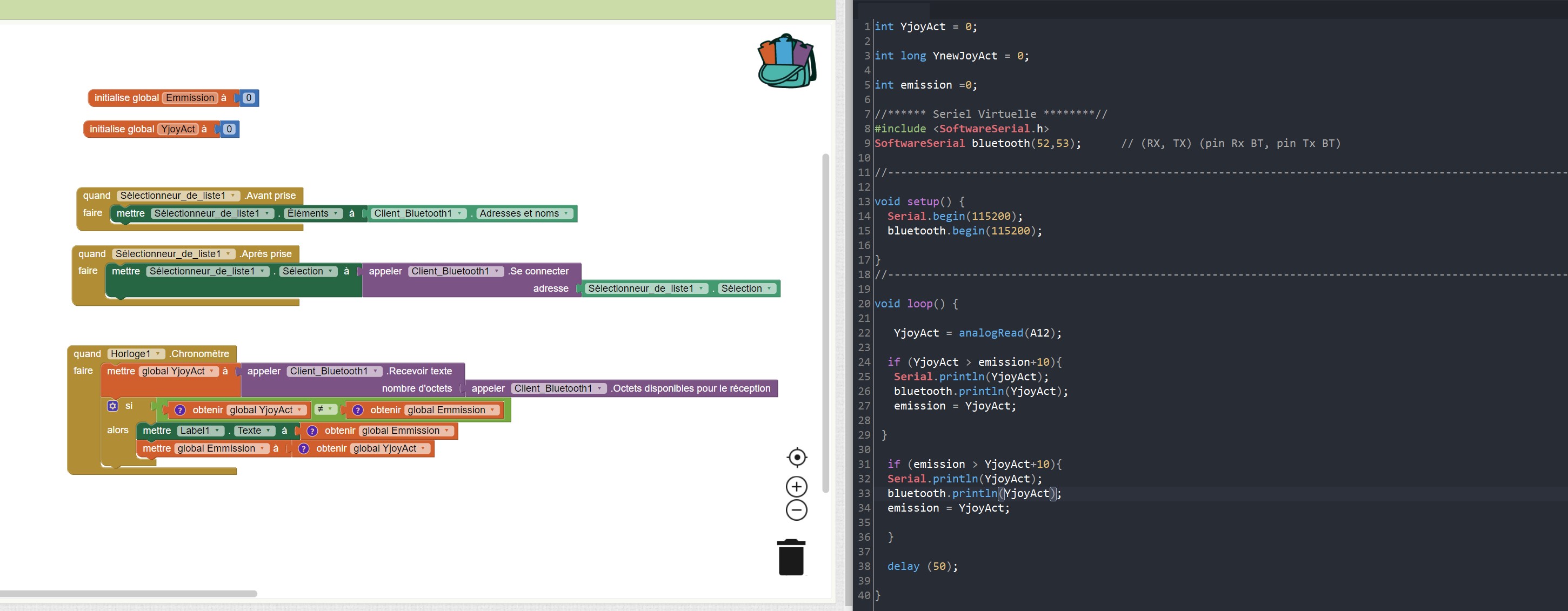
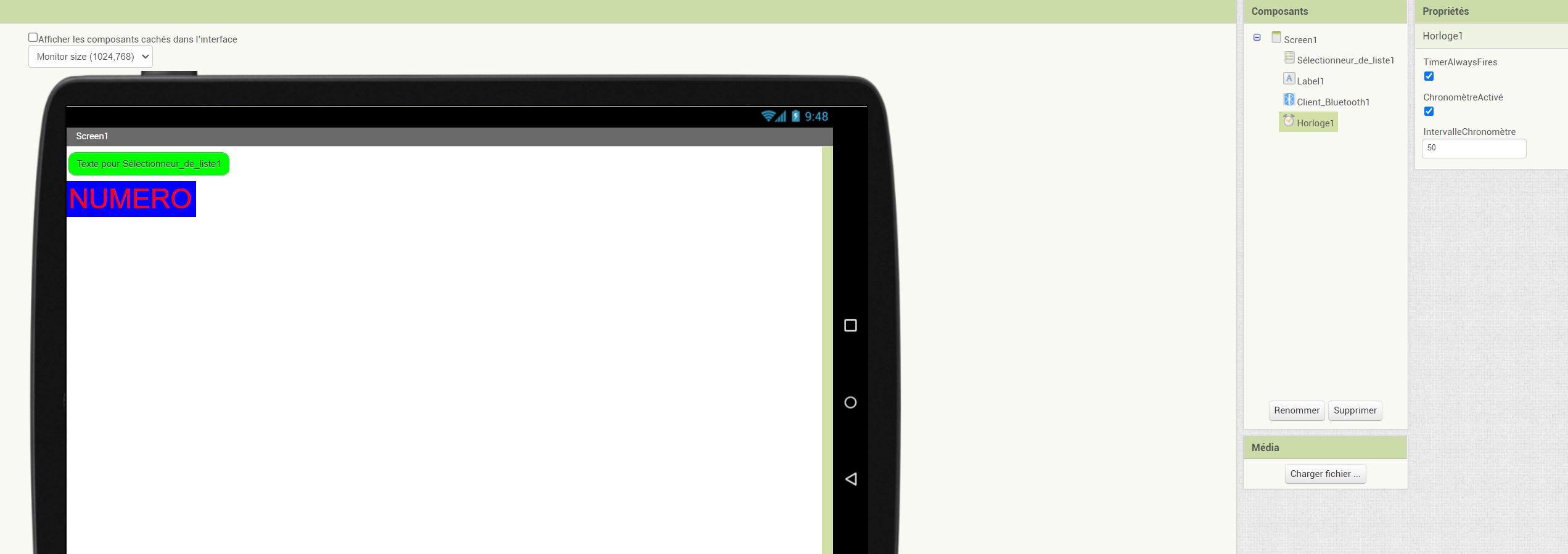
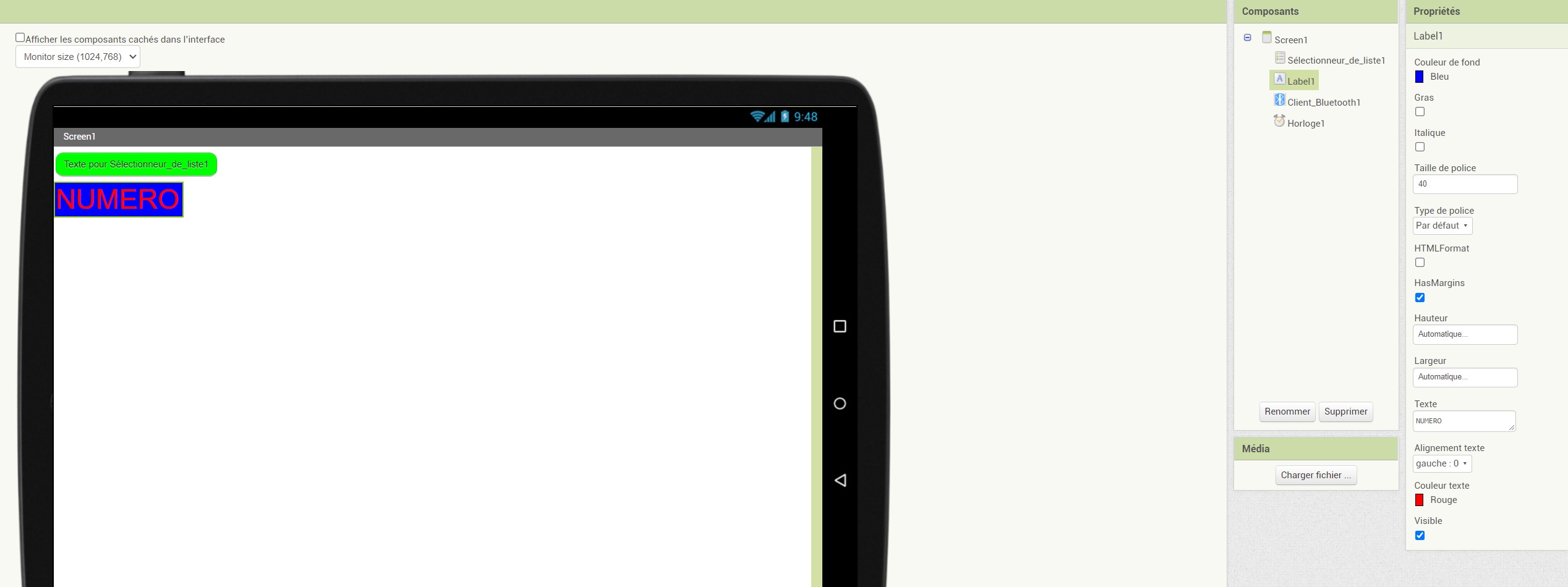
As you can see in the attached photo, I would like to display the position of the stepper motor in real time.
On Arduino, I use the "StepperAccel" library. Inside this library, there is a ready-made function to return the position of the motor (stepper.currentPosition();).
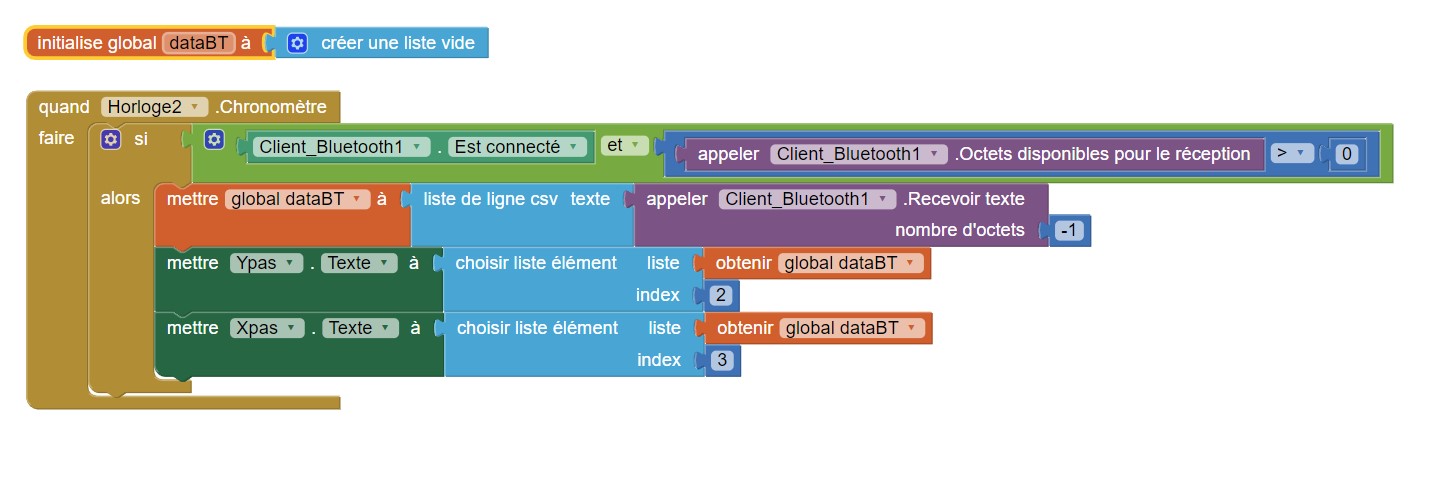
But when I wanted to display this position on MIT APP (in a Label), it produced something weird…
To illustrate my problem, I made a very basic application, with very basic Arduino code.
I would like to display the value of a potentiometer (Nikon microscope joystick).
I got there, but it produces the same problem...
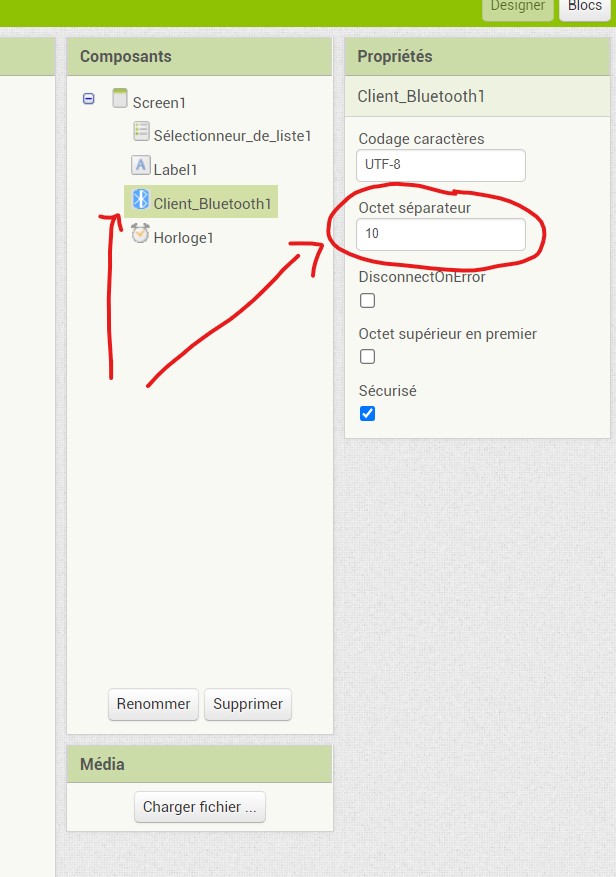
The Label is transformed into a kind of table filled with values, and often the first value disappears...
It's not easy to explain in words, so I'm sharing some screenshots, and I'll also try to share a video.
Maybe help me?
I thank you in advance !