Dear @hasan,
...still too many thanks  . Really, It's just my pleasure to help, if I'm capable
. Really, It's just my pleasure to help, if I'm capable  .
.
OK, we've not been so lucky at the first attempt, therefore we have to investigate a bit more on the HC05 type/status/health.
In effect the HC05 works normally at 38400 but when it is in AT mode, when it works in transmission mode it works at 9600 or at 115200 (unless the user has actually programmed a different baudrate with an AT command). Only a few of them works also in transmission mode at 38400 (probably your one was such type of clone ?).
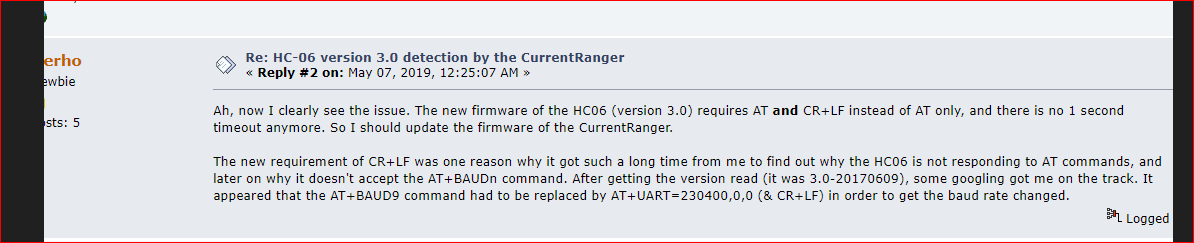
Please be aware that some HC05 clones have a different end-command characters: some have a CRLF pair (0x0D 0x0A) some others only the CR (0x0D).
If the HC05 is in command mode (i.e. AT mode) it does not transmit "normal" data, therefore you should not see any real BT transmission, but only a feedback to the command sender device.
The following pages (though referred to HC06 clones) could help.
Though it happens, honestly it's a bit weird that the HC05 has broken only after a short working time at a voltage higher than 3.3 (though < 5: even if you have reversed the resistors, the max VCC is 5 VDC, which typically does not damage the Rx pin so rapidly). In effect the resistors' partition isn't really 100% mandatory, but "advisory". The following image shows that connection.
HC06 Connection_3_3VDC.pdf (714.6 KB)
Another symptom of working status is the frequency of blinking: as soon as the HC05 powers on, it blinks rapidly until it is connected to a client, and depending upon a sequence of HIGH and LOW voltages to specific pins, it enters the command mode (AT) and blinks with a specific frequency (unfortunately it depends upon the clone manufacturer), and at the end, if it does not enter, or leaves, the AT mode,and goes into the transmisison mode, it changes to a slower one (or a steady one).
Therefore I suspect that the HC05 has entered an unknown mode (maybe it has entered the Master mode, in which it behaves as a client (  ), and therefore it only needs a HW reset. How to do this probably you can try with the aid of one of the following datasheets.
), and therefore it only needs a HW reset. How to do this probably you can try with the aid of one of the following datasheets.
HC-05 Datasheet.pdf (840.6 KB)
HC05 master-slave.pdf (1.5 MB)
HC05_AT_Commands.pdf (83.7 KB)
Another easy, at no cost, test is to change the R4 pins and see what happens.
Yes, I have some NANO, MEGA, ESP8266 and ESP32 boards, somewhere in my drawers, but the UNOR4 and the UNOR3 are, most probably, more similar each other than the other ones, so let's continue with the current configuration.
Another quick test is, connect your NANO following my drawing above, and see what happens.
A trivial doubt: since you've connected pins 2 and 3, instead of 10 and11 as per my Arduino code, I assume you've changed the Arduino source accordingly (sorry to bother you with trivial details, but ...never say never...  ).
).
When you've purchased the HC05, has its specific datasheet been supplied you, as well ? If so, can you share it me, please ?
Another hint is: when you feel in a blind alley, before crying too much and tear your hair out, you could have also a look to the web site of Chris Ward (professorcad.co.uk - @ChrisWard ) where you can find ton's of examples and explanations about Arduino and Bluetooth.
Anyway, since you've already purchased a new HC05, as soon as it arrives, please let me updated.
For sure we'll never give up !
Ugo.