Ways you might control the wheel chair 'robot':
JOYSTICKS with aia code
- https://groups.google.com/g/mitappinventortest/c/4VLUBlP1FxA/m/nUAE8WYmAwAJ
Joystick_mod .aia (7.0 KB)
Simple joystick.
- Joystick_2.aia (4.8 KB)
The above is what you say you want. The code is not finished. Experiment.
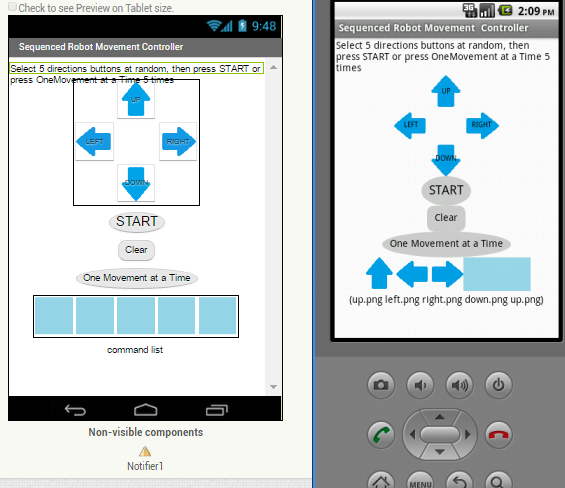
RobotControl.aia (6.1 KB)
This joystick can be used for initial testing. It can be used to test one command at a time or to set up a sequence of commands. This might be appropriate since you are For direction control, I'm using relays to reverse polarity separately for the left and right motors (each connected to one wheel).
- using an extension
[FREE]JoyStick extension
VOICE CONTROL
- Parrot SpeechRecognizer tutorial - controlling a robot car - #2 by SteveJG using HOW TO: Program the native SpeechRecognizer for Continuous Dictation and to do things
Try the joysticks aia s out and find out for yourself if one method is what you want. ![]()
OTHER STUFF OF POSSIBLE INTEREST
Possible Bluetooth sketch