The solution given:
"Setting the phone to standard resolution eliminates the above-mentioned error."
Hmm ![]()
The solution given:
"Setting the phone to standard resolution eliminates the above-mentioned error."
Hmm ![]()
Apologies for the delayed response but nevertheless you got bunch of answers from powerusers, good job guys..
Well, you should have a script to be compiled and uploaded to the ESP32. Your App sends simple commands to the ESP32 and it's script basically uses those to trigger the servos/motors on - off. You might have speed control in there too, plus a list of things for Wall-E to say, or perhaps and ability to send a short sentence to be read out loud by the Robot.
This is their Script:
/*
-------------------------------------------------------------------
Electronic Parts:
-------------------------------------------------------------------
- 100RPM Bringsmart JGA25-310 High Torque 12V DC Gear Motor from AliExpress https://www.aliexpress.com/item/32855856821.html
255 fastest speed - 220 slowest speed
- 7 Servos (MG92B Robot 13.8g 3.5KG Torque Metal Gear Digital Servos from Banggood.com)
- PCA9685 16-Channel 12-bit PWM Servo Module (from Banggood.com)
- ESP32 Development Board - DOIT ESP32 DEVKIT V1 Board (Banggood.com)
- L298N Dual H Bridge Stepper Motor Driver Board ((Banggood.com))
- 5 Amp Adjustable DC-DC Step Down Module Power Supply Converter - Buck Converter (set to 5v to 5.5v) (from Banggood.com)
- DFPlayer module (from Banggood.com)
- Micro SD card (to store MP3 files on)
- Ywrobot speaker module Speaker 8ohm 0.5 watt 50mm diameter Note: I did not use the module, just the speaker. (from Banggood.com)
- 100K - 1M ohm resistor on DFPlayer (I am using a 220ohm resistor that seems to work fine)
- 330ohm resistor for LED
- 5mm Red LED
- Voltage Sensor for Arduino DC 0-25V
- 3S LIPO battery (or other approx 12v power supply)
- SSD1306 OLED display 12C module (from Banggood.com) Geekcreit 0.96 Inch 4Pin White IIC I2C OLED Display Module 12864
0.96 Inch
Resolution: 128x64
VCC: 3.3V-5.5V
- Power switch (ON /OFF) I used a 10amp switch
// -------------------------------------------------------------------
// Key Command List
// -------------------------------------------------------------------
// Left head tilt = l
// Right head tilt = r
// Sad head = i
// Neutral head = n
// Eyes Raise = e
// Alarm looped w/ LED Flashing = A
// Reset ESP32 = Z
// Forwards = w
// Backwards = s
// Turn Left = a
// Turn Right = d
// stop motors = q
// Move left arm = L+(number between 0-100)
// Move right arm = R+(number between 0-100)
// Move head rotation = H+(number between 0-100)
// Move neck bottom (To look up or down) = B+(number between 0-100)
// Move neck top (To look up or down) = N+(number between 0-100)
// Move eye left = E+(number between 0-100)
// Move eye right = U+(number between 0-100)
---------------------------------------------
Note: MP3 track play the order they are saved to the microSD card
---------------------------------------------
// Play Sound Track = T+(number between 0-100) allows to have up to 100 sound tracks to play from micro SD card
// Play music clip as Loop = C
// Volume Control = V+(number between 0-30)
// Pause Audio = P
---------------------------------------------
Multi Moves in single Serial string:
---------------------------------------------
H0\nN100\nB0\n = Head forward left
H0\nN100\nB100\n = Neck up left
H100\nN100\nB0\n = Head forward right
H100\nN100\nB100\n = Neck up right
H0\nB0\nN25\n = Look left
H100\nB0\nN25\n = Look right
H50\nB0\nN25\nn\n = Center Head
H50\nB0\nN100\nn\n = Look down
H50\nB100\nN0\nn\n = Look up
*/
// -------------------------------------------------------------------
////////Libraries/////////
// -------------------------------------------------------------------
#include <Arduino.h>
#include <analogWrite.h>
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#include "DFRobotDFPlayerMini.h"
#include "BluetoothSerial.h"
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
#define SCREEN_WIDTH 128 // OLED display width, in pixels
#define SCREEN_HEIGHT 64 // OLED display height, in pixels
//See OLED datasheet for Address; normally 0x3D for 128x64, 0x3C for 128x32 (2 color display (yellow top 25%, blue bottom) 128x64 uses 0x3C)
#define SCREEN_ADDRESS 0x3C
// Declaration for an SSD1306 display connected to I2C (SDA = pin 21, SCL = pin 22 on ESP32 that I am using)
Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, -1);
// Servo shield controller class - assumes default address 0x40
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
//Motor Inputs to L298 for motor controller
#define ENA 13 // Right Motor
#define ENB 25 // Left Motor
// Left Track
#define IN1 12
#define IN2 14
//Right Track
#define IN3 27
#define IN4 26
// Sound Track Selection
byte Track;
// Setting PWM properties
const int freq = 30000;
const int pwmChannel_A = 0; // Channel for Right Motor
const int pwmChannel_B = 1; // Channel for Left Motor
const int resolution = 8;
int rightMotorSpeed = 220; // Starting-Lowest Motor Speed
int leftMotorSpeed = 220; // Starting-Lowest Motor Speed
#define SR_OE 23 // Servo shield output enable pin
// Voltage Sensor Pin
const int Analog_channel_pin = 36;
// Floats for ADC voltage & Input voltage
float adc_voltage = 0.0;
float in_voltage = 0.0;
// Floats for resistor values in divider (in ohms)
float R1 = 30000.0;
float R2 = 7500.0;
// Float for Reference Voltage
float ref_voltage = 3.3;
// Integer for ADC value
int adc_value = 0;
//Used to make voltage reading more accurate (my acutal voltage was reading exactly 0.5volts higher then the ESP32 ADC output which is not very accurate)
// Test your voltage and adjust this variable accordingly
float voltageCorrection = 0.5;
// Define other constants
#define FREQUENCY 10 // Time in milliseconds of how often to update servo and motor positions
#define SERVOS 7 // Number of servo motors
#define THRESHOLD 1 // The minimum error which the dynamics controller tries to achieve
#define MOTOR_OFF 7000 // Turn servo motors off after 6 seconds
#define MAX_SERIAL 18 // Maximum number of characters that can be received before buffer is cleared
// Bluetooth serial
BluetoothSerial SerialBT;
// DFPlayer serial
HardwareSerial mySoftwareSerial(1);
DFRobotDFPlayerMini myDFPlayer;
byte volume = 20;
// Runtime Variables
unsigned long lastTime = 0;
unsigned long motorTimer = 0; //used in manageServos() function - uninterrupted delay used to Disable servos if robot is not moving
unsigned long motorTime = 0; //used to track time in motorSpeed() function - motor increasing speed delay
unsigned long motorDelay = 100; //delay amount for uninterrupted delay motor to increase speed
unsigned long updateTimer = 0;
unsigned long batteryTimer = 0; //used to track time for checking voltage
unsigned long batteryDelay = 15000; //checks voltage only once every 15 secs
const int ledPin = 15; //LED connected to digital pin 15
// Serial Parsing
char firstChar;
char serialBuffer[MAX_SERIAL];
uint8_t serialLength = 0;
// ****** SERVO MOTOR CALIBRATION *********************
// Servo Positions: Low,High
int preset[][2] = {
{468, 122}, // head rotation
{135, 558}, // neck top
{230, 610}, // neck bottom
{225, 410}, // eye right
{490, 350}, // eye left
{495, 220}, // arm left
{260, 528} // arm right
};
// *****************************************************
// Servo Control - Position, Velocity, Acceleration
// -------------------------------------------------------------------
// Servo Pins: 0, 1, 2, 3, 4, 5, 6
// Joint Name: head,necT,necB,eyeR,eyeL,armL,armR
float curpos[] = { 248, 560, 140, 475, 270, 250, 290}; // Current position (units)
float setpos[] = { 248, 560, 140, 475, 270, 250, 290}; // Required position (units)
float curvel[] = { 0, 0, 0, 0, 0, 0, 0}; // Current velocity (units/sec)
float maxvel[] = { 500, 400, 500, 2400, 2400, 600, 600}; // Max Servo velocity (units/sec)
float accell[] = { 450, 300, 480, 1800, 1800, 500, 500}; // Servo acceleration (units/sec^2)
// ------------------------------------------------------------------
// SETUP Configuration:
// ------------------------------------------------------------------
void setup() {
// Output Enable (EO) pin for the servo motors
pinMode(SR_OE, OUTPUT);
digitalWrite(SR_OE, HIGH);
// Communicate with servo shield (Analog servos run at ~60Hz)
pwm.begin();
pwm.setPWMFreq(60);
// Turn off servo outputs
for (int i = 0; i < SERVOS; i++) pwm.setPin(i, 0);
// Initialize serial communication
mySoftwareSerial.begin(9600, SERIAL_8N1, 16, 17); // speed, type, RX, TX (for DFPlayer communication)
Serial.begin(115200); // Serial monitor interface for testing (diagnostics)
SerialBT.begin("WALL-E"); // Bluetooth device name
// SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally
if (!display.begin(SSD1306_SWITCHCAPVCC, SCREEN_ADDRESS)) {
Serial.println(F("SSD1306 allocation failed"));
for (;;);
}
display.clearDisplay();
display.display();
delay(10);
// Soft start the servo motors
digitalWrite(SR_OE, LOW);
// sets the pins as outputs for motor control
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(ENA, OUTPUT);
pinMode(ENB, OUTPUT);
// Red Alert LED
pinMode(ledPin, OUTPUT);
// configure LED PWM functionaly for Both Channels (for Motor Control)
ledcSetup(pwmChannel_A, freq, resolution);
ledcSetup(pwmChannel_B, freq, resolution);
// attach the channel to the GPIO to be controlled by PWM Channels (for Motor Control)
ledcAttachPin(ENA, pwmChannel_A);
ledcAttachPin(ENB, pwmChannel_B);
Serial.println(F("--------------------"));
Serial.println(F("Initializing DFPlayer ... (May take 3~5 seconds)"));
if (!myDFPlayer.begin(mySoftwareSerial)) { //Use softwareSerial for ESP32 to communicate with DFPlayer module.
Serial.println(myDFPlayer.readType(), HEX);
Serial.println(F("Unable to begin:"));
Serial.println(F("1.Please recheck the connection!"));
Serial.println(F("2.Please insert the SD card!"));
while (true);
}
Serial.println(F("DFPlayer Mini online."));
//----Set volume----
myDFPlayer.volume(volume); //Set volume value (0~30)
myDFPlayer.setTimeOut(500); //Set serial communicataion time out 500ms
//----Set device we use SD as default----
myDFPlayer.outputDevice(DFPLAYER_DEVICE_SD);
PowerStartup ();
//----Read information----
Serial.print(F("Volume Level: "));
Serial.println(myDFPlayer.readVolume()); //read current volume
Serial.print(F("Detected Sound Files: "));
Serial.println(myDFPlayer.readFileCounts()); //read all file counts in SD card
myDFPlayer.playFolder(33, 1); // plays startup sound clip (first clip in folder /33)
// Set head to neutral state on startup
setpos[4] = int(0.4 * (preset[4][1] - preset[4][0]) + preset[4][0]);
setpos[3] = int(0.4 * (preset[3][1] - preset[3][0]) + preset[3][0]);
// Set arms to lowest point on startup
setpos[5] = int(0 * 0.01 * (preset[5][1] - preset[5][0]) + preset[5][0]);
setpos[6] = int(0 * 0.01 * (preset[6][1] - preset[6][0]) + preset[6][0]);
delay(1200);
voltageReading (); // Used to add the voltage reading to the Variable before the loop starts so there is no delay on actual voltage reading when booting up the ESP32
}
// -------------------------------------------------------------------
// MAIN PROGRAM LOOP
// -------------------------------------------------------------------
void loop() {
checkBatteryLevel();
// Read any new incoming serial data
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
if (SerialBT.available() > 0) { //Serial.read(); to use Serial Montior input control
readSerial();
}
// Move Servos and wheels at regular time intervals
// -- -- -- -- -- -- -- -- -- -- -- -- -- --
if (updateTimer < millis()) {
updateTimer = millis() + FREQUENCY;
unsigned long newTime = micros();
float dt = (newTime - lastTime) / 1000.0;
lastTime = newTime;
manageServos(dt);
}
}
// ------------------------------------------------------------------
// FUNCTIONS
// ------------------------------------------------------------------
// Note: the positive and negative wires to motors connected to the L298 motor controller affect the direction of the motors and what direction the Inputs (IN1 to IN4) control.
// -------------------------------------------------------------------
// Move Forward
// -------------------------------------------------------------------
void forward() {
digitalWrite(IN3, 0); // turn off
digitalWrite(IN2, 0); // turn off
digitalWrite(IN1, 1); // turn on Left track
digitalWrite(IN4, 1); // turn on Right track
motorSpeed();
}
// -------------------------------------------------------------------
// Move Backwards
// -------------------------------------------------------------------
void backwards() {
digitalWrite(IN1, 0); // turn off
digitalWrite(IN4, 0); // turn off
digitalWrite(IN2, 1); // turn on Left track
digitalWrite(IN3, 1); // turn on Right track
motorSpeed();
}
// -------------------------------------------------------------------
// Turn Left
// -------------------------------------------------------------------
void left() {
digitalWrite(IN2, 0); // turn off
digitalWrite(IN4, 0); // turn off
digitalWrite(IN1, 1); // turn on Left track (forward direction)
digitalWrite(IN3, 1); // turn on Right track (backwards direction)
motorSpeed();
}
// -------------------------------------------------------------------
// Turn Right
// -------------------------------------------------------------------
void right() {
digitalWrite(IN1, 0); // turn off
digitalWrite(IN3, 0); // turn off
digitalWrite(IN2, 1); // turn on Left track (backwards direction)
digitalWrite(IN4, 1); // turn on Right track (forward direction)
motorSpeed();
}
// -------------------------------------------------------------------
// Stop motors
// -------------------------------------------------------------------
void stopMotors() {
digitalWrite(IN1, 0); // turn off
digitalWrite(IN3, 0); // turn off
digitalWrite(IN2, 0); // turn off
digitalWrite(IN4, 0); // turn off
rightMotorSpeed = 220; // Reset Motor Speed to lowest
leftMotorSpeed = 220; // Reset Motor Speed to lowest
}
// -------------------------------------------------------------------
// Gradually increases motor speed from lowest to max speed
// -------------------------------------------------------------------
void motorSpeed() {
while (rightMotorSpeed <= 255 || leftMotorSpeed <= 255) {
ledcWrite(pwmChannel_A, rightMotorSpeed);
ledcWrite(pwmChannel_B, leftMotorSpeed);
Serial.print("Forward A: ");
Serial.println(rightMotorSpeed);
Serial.print("Forward B: ");
Serial.println(leftMotorSpeed);
unsigned long currentMillis = millis();
// Create uninterrupted delay for increasing speed controlled by motorDelay variable
if (currentMillis - motorTime > motorDelay) {
motorTime = currentMillis;
rightMotorSpeed = rightMotorSpeed + 5;
leftMotorSpeed = leftMotorSpeed + 5;
}
}
}
// -------------------------------------------------------------------
// READ INPUT FROM SERIAL
// -------------------------------------------------------------------
void readSerial() {
// Read incoming byte
char inchar = SerialBT.read(); //Serial.read(); to use Serial Montior input control
// If the string has ended, evaluate the serial buffer
if (inchar == '\n' || inchar == '\r') {
if (serialLength > 0)
evaluateSerial();
serialBuffer[0] = 0;
serialLength = 0;
}
// Otherwise add to the character to the buffer
else {
if (serialLength == 0) firstChar = inchar;
else {
serialBuffer[serialLength - 1] = inchar;
serialBuffer[serialLength] = 0;
}
serialLength++;
// To prevent overflows, evaluate the buffer if it is full then reset buffer
if (serialLength == MAX_SERIAL) {
evaluateSerial();
serialBuffer[0] = 0;
serialLength = 0;
}
}
}
// -------------------------------------------------------------------
// EVALUATE INPUT FROM SERIAL
// -------------------------------------------------------------------
void evaluateSerial() {
// Evaluate integer number in the serial buffer
int number = atoi(serialBuffer);
Serial.print(firstChar); Serial.println(number);
// -------------------------------------------------------------------
// Manual servo control
// -------------------------------------------------------------------
if (firstChar == 'L' && number >= 0 && number <= 100) { // Move left arm
setpos[5] = int(number * 0.01 * (preset[5][1] - preset[5][0]) + preset[5][0]);
}
else if (firstChar == 'R' && number >= 0 && number <= 100) { // Move right arm
setpos[6] = int(number * 0.01 * (preset[6][1] - preset[6][0]) + preset[6][0]);
}
else if (firstChar == 'B' && number >= 0 && number <= 100) { // Move neck bottom
setpos[2] = int(number * 0.01 * (preset[2][1] - preset[2][0]) + preset[2][0]);
}
else if (firstChar == 'N' && number >= 0 && number <= 100) { // Move neck top
setpos[1] = int(number * 0.01 * (preset[1][1] - preset[1][0]) + preset[1][0]);
}
else if (firstChar == 'H' && number >= 0 && number <= 100) { // Move head rotation
setpos[0] = int(number * 0.01 * (preset[0][1] - preset[0][0]) + preset[0][0]);
}
else if (firstChar == 'E' && number >= 0 && number <= 100) { // Move eye left
setpos[4] = int(number * 0.01 * (preset[4][1] - preset[4][0]) + preset[4][0]);
}
else if (firstChar == 'U' && number >= 0 && number <= 100) { // Move eye right
setpos[3] = int(number * 0.01 * (preset[3][1] - preset[3][0]) + preset[3][0]);
}
// -------------------------------------------------------------------
// Manual Movements with WASD
// -------------------------------------------------------------------
else if (firstChar == 'w') { // Forward movement
forward();
}
else if (firstChar == 's') { // Backward movement
backwards();
}
else if (firstChar == 'a') { //Turn left
left();
}
else if (firstChar == 'd') { // Turn right
right();
}
else if (firstChar == 'q') { // Stop movement & Pause/Sounds
stopMotors();
}
// -------------------------------------------------------------------
// Manual Eye Movements
// -------------------------------------------------------------------
else if (firstChar == 'l') { // Left head tilt
setpos[4] = preset[4][0];
setpos[3] = preset[3][1];
}
else if (firstChar == 'r') { // Right head tilt
setpos[4] = preset[4][1];
setpos[3] = preset[3][0];
}
else if (firstChar == 'i') { // Sad head
myDFPlayer.playFolder(33, 5); // Plays sad sound clip
setpos[4] = preset[4][0];
setpos[3] = preset[3][0];
}
else if (firstChar == 'n') { // Neutral head
setpos[4] = int(0.4 * (preset[4][1] - preset[4][0]) + preset[4][0]);
setpos[3] = int(0.4 * (preset[3][1] - preset[3][0]) + preset[3][0]);
}
else if (firstChar == 'e') { // Eye Raise
setpos[4] = int(99 * 0.01 * (preset[4][1] - preset[4][0]) + preset[4][0]);
setpos[3] = int(99 * 0.01 * (preset[3][1] - preset[3][0]) + preset[3][0]);
myDFPlayer.playFolder(33, 6); // Play suprised sound clip
}
// -------------------------------------------------------------------
// Audio
// -------------------------------------------------------------------
else if (firstChar == 'V' && number > 0 && number < 30) {
volume = number;
myDFPlayer.volume(volume); //Set volume value (0~30)
Serial.println(myDFPlayer.readVolume()); //read current volume
}
else if (firstChar == 'T' && number >= 0 && number <= 99) {
Track = number;
myDFPlayer.pause();
myDFPlayer.playFolder(33, Track);
Serial.println(F("Now Playing Track:"));
Serial.println(myDFPlayer.readCurrentFileNumber()); //read current play file number
}
else if (firstChar == 'C') {
myDFPlayer.loop(7); //Loop a music clip - mp3 (7)means it was the 7th MPS saved to the microSD card.
}
else if (firstChar == 'P') { // Pause Audio
myDFPlayer.pause();
}
else if (firstChar == 'A') {
myDFPlayer.playFolder(33, 4); //Play Alarm clip (save to folder named 33 and is 4th file saved to the SD card)with LED flashing delay (adjusted delay to sync with time to sound clip)
for (int i = 0; i < 3; i++) {
digitalWrite(ledPin, HIGH);
delay(570);
digitalWrite(ledPin, LOW);
delay(570);
}
}
// -------------------------------------------------------------------
// Reset ESP32 with Bluetooth / Serial command (used as ESP32 does not seem to allow device to reconnect after a a disconnect to via Bluetooth)
// -------------------------------------------------------------------
else if (firstChar == 'Z') {
ESP.restart(); // Reset ESP32
}
}
// -------------------------------------------------------------------
// MANAGE THE MOVEMENT OF THE SERVO MOTORS
// -------------------------------------------------------------------
void manageServos(float dt) {
// SERVO MOTORS
// - - - - - - - - - - - - -
bool moving = false;
for (int i = 0; i < SERVOS; i++) {
float posError = setpos[i] - curpos[i];
// If position error is above the threshold
if (abs(posError) > THRESHOLD && (setpos[i] != -1)) {
digitalWrite(SR_OE, LOW);
moving = true;
// Determine motion direction
bool dir = true;
if (posError < 0) dir = false;
// Determine whether to accelerate or decelerate
float acceleration = accell[i];
if ((curvel[i] * curvel[i] / (2 * accell[i])) > abs(posError)) acceleration = -accell[i];
// Update the current velocity
if (dir) curvel[i] += acceleration * dt / 1000.0;
else curvel[i] -= acceleration * dt / 1000.0;
// Limit Velocity
if (curvel[i] > maxvel[i]) curvel[i] = maxvel[i];
if (curvel[i] < -maxvel[i]) curvel[i] = -maxvel[i];
float dP = curvel[i] * dt / 1000.0;
if (abs(dP) < abs(posError)) curpos[i] += dP;
else curpos[i] = setpos[i];
pwm.setPWM(i, 0, curpos[i]);
} else {
curvel[i] = 0;
}
}
// Disable servos if robot is not moving
// This prevents the motors from overheating
if (moving) motorTimer = millis() + MOTOR_OFF;
else if (millis() > motorTimer) {
//digitalWrite(SR_OE, HIGH);
for (int i = 0; i < SERVOS; i++) {
pwm.setPin(i, 0);
}
}
}
// -------------------------------------------------------------------
// VOLTAGE reading - Reads the Analog Input of Voltage sensor and output to actual voltage.
// -------------------------------------------------------------------
void voltageReading () {
adc_value = analogRead(Analog_channel_pin);
// Determine voltage at ADC input
adc_voltage = (adc_value * ref_voltage) / 4095.0;
// Calculate voltage at divider input
in_voltage = adc_voltage / (R2 / (R1 + R2));
in_voltage = in_voltage + voltageCorrection;
Serial.print("Input Voltage = ");
Serial.println(in_voltage, 1); // Sends Voltage reading out to Arduino Serial Monitor
SerialBT.println(in_voltage, 1); // Sends Voltage reading in text format out to Bluetooth App
}
// -------------------------------------------------------------------
// Checks Voltage Reading every 15seconds set by batteryDelay variable
// -------------------------------------------------------------------
void checkBatteryLevel() {
unsigned long currentMillis = millis();
// Checks voltage only once every 15 secs
if (currentMillis - batteryTimer > batteryDelay) {
batteryTimer = currentMillis;
voltageReading ();
}
BatteryDisplay();
}
// -------------------------------------------------------------------
// Displays number of bars on OLED display based on the Voltage reading (10 bars=100%, 5 Bars=50%, 1 Bar=10%)
// -------------------------------------------------------------------
void BatteryDisplay() {
if (in_voltage >= 12.2) {
Battery_100p();
}
else if (in_voltage < 12.2 && in_voltage >= 11.8) {
Battery_90p();
}
else if (in_voltage < 11.8 && in_voltage >= 11.5) {
Battery_80p();
}
else if (in_voltage < 11.5 && in_voltage >= 11.2) {
Battery_70p();
}
else if (in_voltage < 11.2 && in_voltage >= 11) {
Battery_60p();
}
else if (in_voltage < 10.8 && in_voltage >= 10.6) {
Battery_50p();
}
else if (in_voltage < 10.6 && in_voltage >= 10.4) {
Battery_40p();
}
else if (in_voltage < 10.4 && in_voltage >= 10.3) {
Battery_30p();
}
else if (in_voltage < 10.3 && in_voltage >= 10.1) {
Battery_20p();
}
// If voltage goes Below 10.1 voltage Alarm sounds the Red LED flashed and OLED flashes the 10%(bottom) bar.
// Lipo Battey should be recharged to prevent damage at this point
else if (in_voltage < 10.1) {
myDFPlayer.playFolder(33, 4); //Play Alarm clip (save to folder named 33 and is 4th file saved to the SD card)with LED flashing delay (adjusted delay to sync with time to sound clip)
for (int i = 0; i < 3; i++) { //make LED & OLED flash
display.clearDisplay();
display.display();
digitalWrite(ledPin, HIGH);
delay(570);
digitalWrite(ledPin, LOW);
Battery_10p();
delay(570);
}
}
}
// -------------------------------------------------------------------
// Draws Rectangle Bars on OLED display
// -------------------------------------------------------------------
void Battery_10p() {
display.clearDisplay();
display.fillRect(108, 0, 16, 64, WHITE); // 10% percent
display.display();
}
void Battery_20p() {
display.clearDisplay();
display.fillRect(108, 0, 16, 64, WHITE);
display.fillRect(96, 0, 7, 64, WHITE); // 20% percent
display.display();
}
void Battery_30p() {
display.clearDisplay();
display.fillRect(108, 0, 16, 64, WHITE);
display.fillRect(96, 0, 7, 64, WHITE);
display.fillRect(84, 0, 7, 64, WHITE); // 30% percent
display.display();
}
void Battery_40p() {
display.clearDisplay();
display.fillRect(108, 0, 16, 64, WHITE);
display.fillRect(96, 0, 7, 64, WHITE);
display.fillRect(84, 0, 7, 64, WHITE);
display.fillRect(72, 0, 7, 64, WHITE); // 40% percent
display.display();
}
void Battery_50p() {
display.clearDisplay();
display.fillRect(108, 0, 16, 64, WHITE);
display.fillRect(96, 0, 7, 64, WHITE);
display.fillRect(84, 0, 7, 64, WHITE);
display.fillRect(72, 0, 7, 64, WHITE);
display.fillRect(60, 0, 7, 64, WHITE); // 50% percent
display.display();
}
void Battery_60p() {
display.clearDisplay();
display.fillRect(108, 0, 16, 64, WHITE);
display.fillRect(96, 0, 7, 64, WHITE);
display.fillRect(84, 0, 7, 64, WHITE);
display.fillRect(72, 0, 7, 64, WHITE);
display.fillRect(60, 0, 7, 64, WHITE);
display.fillRect(48, 0, 7, 64, WHITE); // 60% percent
display.display();
}
void Battery_70p() {
display.clearDisplay();
display.fillRect(108, 0, 16, 64, WHITE);
display.fillRect(96, 0, 7, 64, WHITE);
display.fillRect(84, 0, 7, 64, WHITE);
display.fillRect(72, 0, 7, 64, WHITE);
display.fillRect(60, 0, 7, 64, WHITE);
display.fillRect(48, 0, 7, 64, WHITE);
display.fillRect(36, 0, 7, 64, WHITE); // 70% percent
display.display();
}
void Battery_80p() {
display.clearDisplay();
display.fillRect(108, 0, 16, 64, WHITE);
display.fillRect(96, 0, 7, 64, WHITE);
display.fillRect(84, 0, 7, 64, WHITE);
display.fillRect(72, 0, 7, 64, WHITE);
display.fillRect(60, 0, 7, 64, WHITE);
display.fillRect(48, 0, 7, 64, WHITE);
display.fillRect(36, 0, 7, 64, WHITE);
display.fillRect(24, 0, 7, 64, WHITE); // 80% percent
}
void Battery_90p() {
display.clearDisplay();
display.fillRect(108, 0, 16, 64, WHITE);
display.fillRect(96, 0, 7, 64, WHITE);
display.fillRect(84, 0, 7, 64, WHITE);
display.fillRect(72, 0, 7, 64, WHITE);
display.fillRect(60, 0, 7, 64, WHITE);
display.fillRect(48, 0, 7, 64, WHITE);
display.fillRect(36, 0, 7, 64, WHITE);
display.fillRect(24, 0, 7, 64, WHITE);
display.fillRect(12, 0, 7, 64, WHITE); // 90% percent
display.display();
}
void Battery_100p() {
display.clearDisplay();
display.fillRect(108, 0, 16, 64, WHITE);
display.fillRect(96, 0, 7, 64, WHITE);
display.fillRect(84, 0, 7, 64, WHITE);
display.fillRect(72, 0, 7, 64, WHITE);
display.fillRect(60, 0, 7, 64, WHITE);
display.fillRect(48, 0, 7, 64, WHITE);
display.fillRect(36, 0, 7, 64, WHITE);
display.fillRect(24, 0, 7, 64, WHITE);
display.fillRect(12, 0, 7, 64, WHITE);
display.fillRect(0, 0, 7, 64, WHITE); // 100% percent
display.display();
}
// -------------------------------------------------------------------
// Animates OLED bars as ESP32 boots up
// -------------------------------------------------------------------
void PowerStartup () { // Power up battery level animated
Battery_10p(); delay (500);
Battery_20p(); delay (500);
Battery_30p(); delay (400);
Battery_40p(); delay (400);
Battery_50p(); delay (350);
Battery_60p(); delay (200);
Battery_70p(); delay (200);
Battery_80p(); delay (150);
Battery_90p(); delay (100);
Battery_100p(); delay (10);
}
A lot of "else if" in there, probably neater to use switch...case.
I semi-understand the code, but the part that feels like a huge mystery to me is how do I tie certain buttons to certain parts of code. Like If the user presses a red button on the screen, how do I code so that it transmits something to the esp that says "do ____ with servo 4" or how does it know that the joystick icon is meant to control the dc motors function?. Is that all found within the blocks?
Based on the notes on that code, it looks like certain keyboard buttons perform certain things within the code, so how am I converting those keys to a graphic interface?
I realize these are suuuuuuper basic questions, if it would be easier, is there like a course or guide that I should read?
My current goal is to make it so I have an ESP32 connected to a pca9685 with 8 servos and a l298n h bridge to run 2 dc motors and control that with a phone app.
Next I would want to have a view from a camera mounted in one of the eyes that I can view within the app
The rest of the stuff like the voltage display and mp3stuff, I am perfectly happy without for the time being. Those are just bells and whistles at the moment.
I'm virtually blank on coding the esp32 as well as the app as I have only ever copied what others have provided.
I think it would save your hair from going grey if you did some of the MIT tutorials first. After that, Power User Juan Antonio has some excellent guides on how your App Inventor App can control hardware like the ESP32, including using an on board camera.
Also, prepare for failure! Actually a fair amount of learning comes from making mistakes - we have all been there and done that. So plan what you are going to do on paper first, and let yourself enjoy the challenge. It's frustrating when something doesn't work, but when it finally does - brilliant!
Far easier than the Project you have been given - App Inventor has button components for a graphical interface.
really basic description:
App Button touched or clicked ---> App event Block sends bluetooth signal to esp32 ---> esp32 drives servo motor
EDIT: This is a sample Sketch that (nearly) drives a potted flower watering machine. The User (App) sends a simple 1 character code to the microcontroller (esp32, Arduino etc) via Bluetooth. The Serial.read() function receives that character "IncomingValue". Depending on the character, a servo command is executed or a sensor value is read. That's pretty simple, right?
#include<Servo.h>
Servo servomotor1;
//833 air
//632 water
//vars
char IncomingValue = 0;
const int AirValue = 833; //you need to change this value that you had recorded in the air
const int WaterValue = 632; //you need to change this value that you had recorded in the water
int intervals = (AirValue - WaterValue) / 3;
int soilMoistureValue = 0;
unsigned long lgUpdateTime;
void setup()
{
servomotor1.attach(12);
Serial.begin(9600); // open serial port, set the baud rate to 9600 bps
lgUpdateTime = millis();
}
void loop()
{
//Excute loop every 10 seconds
if((millis() - lgUpdateTime) > 10000)
{
lgUpdateTime = millis();
if(Serial.available() > 0)
{
IncomingValue = Serial.read();
switch (IncomingValue)
{
case '1':
servomotor1.write(0);//watering
break;
case '0':
servomotor1.write(120);//original position
break;
case 'M':
soilMoistureValue = analogRead(A0);
Serial.print(soilMoistureValue);
Serial.println();
break;
}
}
}
}
It was ABG who worked out where the source of the problem is.
Poprawiłem bloki w/g instrukcji ABG napis Error1003 się nie pojawia. Sowich załączenie radia nie działa. powinno się pojawić radio do odtwarzania plików z MP3playera. Radio pojawia się na chwilę przy odpaleniu programu i chowa się na górze nie ma reakcji a przełącznik. Proszę o pomoc. W telefonie na wersji bez poprawek po zmianie rozdzielczości to działa, Bez error . Próbuję tablet tam zmiana rozdzielczości nic nie daje cały czas jest error na ekranie ale robot reaguje radio się nie odpala.
I applied the blocking fix suggested by user ABG. The error 1003 message disappeared. The radio switch didn't work. I can't listen to the MP3 player. The radio panel appears briefly and then disappears when I launch the application. Please help.
Post your ESP source code here, along with your exported aia file.
Is the mp3 player on the wall-E device?
All I see is your app sending Tnnn\n to the other device when using the "ragio" controls.
You did not include the other device's code in your zip file.
I see you sending text to the other device in all your controls, but I don't see any blocks to look for responses from the other device that the text got through.
The radio works correctly when controlled from a phone using the original *.aia file build. MP3 files play. This is not a problem with the ESP code. The radio does not work on a tablet using the *.aia file modified according to the instructions. On a tablet, the original *.aia file produces an error message.
The original codes used in the project are from:
Link to my code:
Plik kodu
Can you post the error message?
Error 1003: canvas height cannot be set to non-positive number.
I tried compiling it on three different resolutions—phone, tablet, and monitor. It didn't produce the desired result.
video with sound from the player:
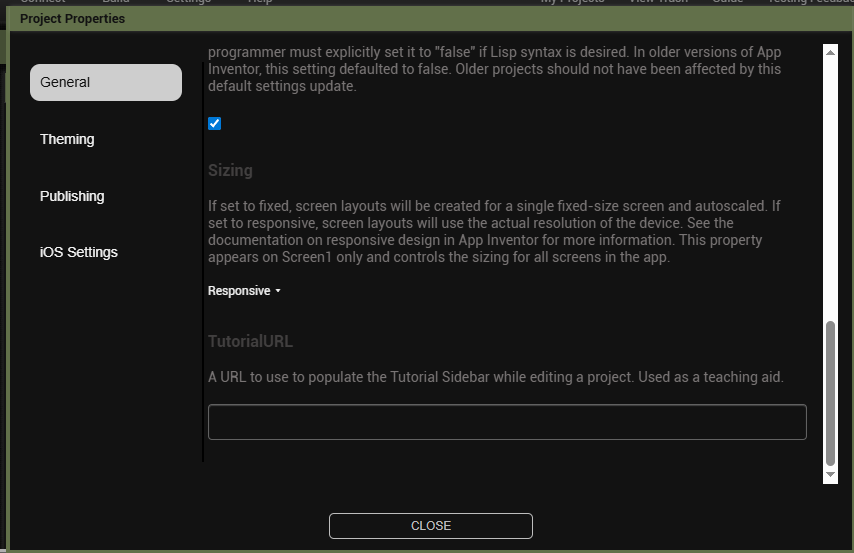
Reading the long thread, I see problems with pixel counting, versus using Responsive Design.
Responsive Design takes the given pixel sizes of the device and works backwards from there to size screen components. Fixed Design forces the screen into a given number of pixels.
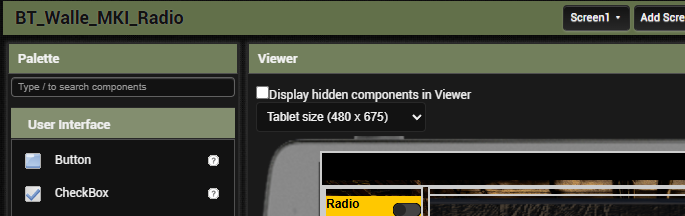
In the Designer, set the Device size to Tablet(480 x 675)
Looking in the Project Properties, I see
Change it to Fixed, to apply your chosen pixel counts.
These were the default settings I had in three attempts to compile with different resolutions. The error message disappeared, but the MP3 radio panel didn't appear after tapping the switch (upper right corner). The radio panel is briefly visible when the app launches and then disappears at the top of the screen.
I advise changing the app code to just turn the visibility of the "radio" arrangement on and off (.Visible = true/false) under direct control of the radio switch in the adjoining Arrangement, and removing the Clock based animated resizing of the radio Arrangement.
How much of YOUR time and effort are you willing to put into eye candy?
I built this robot from scratch – 3D printing and electronics based on a design from the hackster website. It took dozens of hours. Unfortunately, I can't code, but I can compile from shared code. I'm 70 years old and I'm doing this for my grandson. I was hoping for expert help in solving the problem. Thank you for the conversation. Best regards.