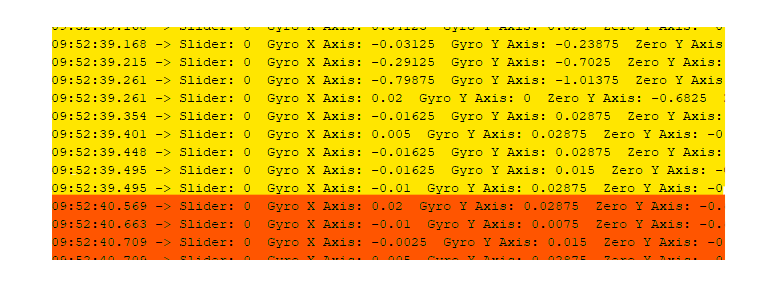
Hi, I've been having problems with the transmission of data over Wi-Fi. In simple terms, I'm sending constant blocks of data to an ESP-32 via the App and having strong delays every 4/5 blocks received. Here I uploaded a photo that shows the problem, you can see that between the yellow to the orange part there is a 1 sec delay. This happens randomly, and I have no clue what is causing that.
If anyone has some insight on the problem, any help is greatly appreciated.
Photo of the problem:
Code:
//PINES DISPONIBLES 14 ,17, 19, 21, 22, 23.
/*
SOBRE LA POSICION DE LOS MOTORES":
^^ M1 M2 ^^
^^ M3 M4 ^^
SOBRE EL GIROSCOPIO
X= ROLL
Y=PITCH
*/
/*
Advertencias:
- Tener en cuenta que la posicion del giroscopio/*accelerometro y magnetometro hara que haya que
redefinir la configuracion de los motores y demas varables.
*/
/*
INCLUIR:
WiFi.RSSI()
WiFi.setHostname(YOUR_NEW_HOSTNAME);
IPAddress local_IP(192, 168, 1, 184);
// Set your Gateway IP address
IPAddress gateway(192, 168, 1, 1);
IPAddress subnet(255, 255, 0, 0);
IPAddress primaryDNS(8, 8, 8, 8); // optional
IPAddress secondaryDNS(8, 8, 4, 4); // optional
*/
#include <WiFi.h>
//#include "I2Cdev.h"
//#include "MPU6050.h"
#include "Wire.h"
WiFiServer server(80);
const char* ssid = "SSID"; //REMPLAZAR POR SSID
const char* password = "PASSWORD"; //REMPLAZAR POR CONTRA
String msj; //STRING QUE GUARDA EL MENSAJE RECIBIDO POR WIFI
int TimingVar=950;
float bat = 99.9; //VARIABLE DE ALAMACENAMIENTO DE NIVEL DE BATERIA
//FALTA VARIABLE DE MAGNETOMETRO!
float AnglePitchX;
float AnglePitchY;
float ax, ay;
float DatosApp[5] = {0,0,0,0,0}; //VARIABLE DE DATOS DE DIRECCION Y POTENCIA DE LA APP
int PW[4] = {0,0,0,0}; //VARIABLES FINALES DEL DUTY CICLE DEL PWM DE LOS MOTORES // ORDEN M1,M2,M3,M4
float PWRoll; //VARIABLES DE ROLL
float PWPitch; //VARIABLES DE PITCH
float PWYaw; //VARIABLES DE YAW
float RpE = 0;
float PpE = 0;
float YpE = 0;
#define M1 12 //DEFINICION DE MOTORES
#define M2 14 //DEFINICION DE MOTORES
#define M3 26 //DEFINICION DE MOTOREaS
#define M4 27 //DEFINICION DE MOTORES
#define KpRoll 0 //DEFINICION DE CONSTANTE PARA AJUSTE PID
#define KiRoll 0 //DEFINICION DE CONSTANTE PARA AJUSTE PID
#define KdRoll 0 //DEFINICION DE CONSTANTE PARA AJUSTE PID
#define KpPitch 0 //DEFINICION DE CONSTANTE PARA AJUSTE PID
#define KiPitch 0 //DEFINICION DE CONSTANTE PARA AJUSTE PID
#define KdPitch 0 //DEFINICION DE CONSTANTE PARA AJUSTE PID
#define KpYaw 0 //DEFINICION DE CONSTANTE PARA AJUSTE PID
#define KiYaw 0 //DEFINICION DE CONSTANTE PARA AJUSTE PID
#define KdYaw 0 //DEFINICION DE CONSTANTE PARA AJUSTE PID
#define PRDiv 1 //DEFINICION DE CONSTANTE PARA DIVIDIR LA ENTRADA DE LA POTENCIA
#define ConstProportional 25.992883792 //DEFINICION DE CONSTANTE PARA AJUSTAR LA SALIDA DEL PID
void WifiStart(){
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
while (WiFi.status() != WL_CONNECTED) {
delay(500);
}
server.begin();
}
void assign(){
String var = "";
int i;
int cont=24;
for(i=24; msj[i]!='&'; i++){var += msj[i];cont++;}
Serial.print("Slider: "); Serial.print(var); Serial.print(" ");
DatosApp[0]= var.toFloat();
var = "";
cont = cont + 7;
for(i=cont; msj[i]!='&'; i++){var += msj[i];cont++;}
Serial.print("Gyro X Axis: "); Serial.print(var); Serial.print(" ");
DatosApp[1]= var.toFloat();
var = "";
cont = cont + 7;
for(i=cont; msj[i]!='&'; i++){var += msj[i];cont++;}
Serial.print("Gyro Y Axis: "); Serial.print(var); Serial.print(" ");
DatosApp[2]= var.toFloat();
var = "";
cont = cont + 4;
for(i=cont; msj[i]!='&'; i++){var += msj[i];cont++;}
Serial.print("Zero Y Axis: "); Serial.print(var); Serial.print(" ");
DatosApp[2]= var.toFloat();
var = "";
cont = cont + 4;
for(i=cont; msj[i]!='\0'; i++){var += msj[i];cont++;}
Serial.print("Zero Y Axis: "); Serial.print(var); Serial.print(" ");
Serial.println("uT");
DatosApp[2]= var.toFloat();
var = "";
}
void clasify(){
/*GET /Res?ID=1205&Slider=165.75&XGyro=0.04875&YGyro=0.04875&0x=-0.06&0y=0.015 HTTP/1.1*/
int temp;
String var = "";
for(int i=12; i!='&'; i++){var += msj[i];}
temp = var.toInt();
if(TimingVar<temp && temp<TimingVar + 8000){
assign();
TimingVar=temp;
}
else if(TimingVar>9950 && temp<1050){
assign();
TimingVar=temp;
}
}
void MotorStart(){
pinMode(M1,OUTPUT);
pinMode(M2,OUTPUT);
pinMode(M3,OUTPUT);
pinMode(M4,OUTPUT);
//VVVV COMPLETAMENTE OPCIONAL VVVV
tone(M1,1975, 250);
tone(M2,1975, 250);
tone(M3,1975, 250);
tone(M4,1975, 250);
delay(350);
tone(M1,2349, 250);
tone(M2,2349, 250);
tone(M3,2349, 250);
tone(27,2349, 250);
delay(350);
tone(M1,2637, 250);
tone(M2,2637, 250);
tone(M3,2637, 250);
tone(M4,2637, 250);
delay(350);
tone(M1,1975, 400);
tone(M2,1975, 400);
tone(M3,1975, 400);
tone(M4,1975, 400);
delay(420);
tone(M1,2637, 400);
tone(M2,2637, 400);
tone(M3,2637, 400);
tone(M4,2637, 400);
delay(500);
// ^^ TERMINA OPCIONAL ^^
}
void WifiConection(){
WiFiClient client = server.available();
client.println("GET /Res?Slider=xx&XGyro=xx&YGyro=xx&0x=xx&0y=xx HTTP/1.1");
client.println("Host: " + String(WiFi.localIP()));
client.println("Connection: close");
client.println();
msj = client.readStringUntil('\n');
//Serial.println(msj);
clasify();
}
void MotorDriver(){
for (int i = 0; i < 4; ++i) {
analogWrite(M1 + i, PW[i]);
}
}/*
void PIDRoll(){
float E = Giroscopio[0] - DatosApp[0];
float IoutRoll = IoutRoll + (E * KiRoll);
PWRoll = (E * KpRoll) + ((E - RpE) * KdRoll) + IoutRoll;
RpE = Giroscopio[0] - DatosApp[0];
}
void PIDPitch(){
float E = Giroscopio[1] - DatosApp[1];
float IoutPitch = IoutPitch + (E * KiPitch);
PWPitch = (E * KpPitch) + ((E - PpE) * KdPitch) + IoutPitch;
PpE = Giroscopio[1] - DatosApp[1];
}
/*void PIDYaw(){
float E = Magnetometro;1
float IoutYaw = Ioutyaw + (E * KiYaw);
PWYaw = (E * KpYaw) + ((E - YpE) * KdYaw) + IoutYaw;
YpE = Magnetometro;
}*/
void setup() {
Serial.begin(115200);
WifiStart(); //INICIO DE RECEPCION DE DATOS
//incialicia_Gyro();
//MotorStart();
//pinMode(X, INPUT); //PIN A DEFINIR PARA CONTROLAR LA CARGA DE LA BATERIA
}
void loop() { //NO PONER DELAYS!!!!!!!
WifiConection(); //RECEPCION DE DATOS
//Giro(); //INPUT DEL GIROSCOPIO
//Magnetometro(); //INPUT DEL MAGNETOMETRO
/*PIDRoll(); //PID ROLL
PIDPitch(); //PID PITCH
PIDYaw(); //PID YAW
PIDconvert(); //SUMA DE LOS OUTPUT DE LOS PID
MotorDriver();*/
//Serial.println(DatosApp[0]);
delay(20); //UNICO DELAY PARA DEJA PROCESAR
}
App:
App.aia (1.4 MB)