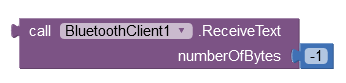
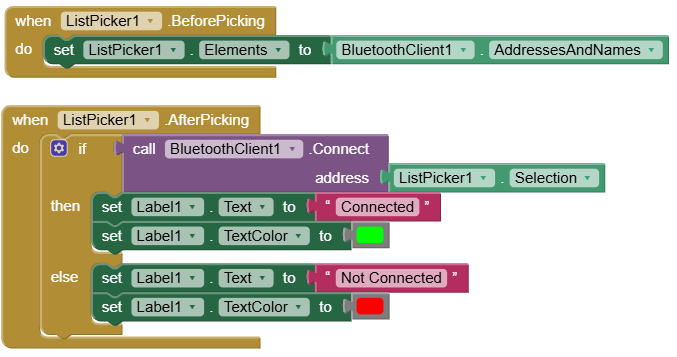
Greetings, I have built an arduino based medicine dispenser with servo motor. The keypad is used to key in the password and LCD to display the condition of the system. The problem I am facing right now is I can't seem to send the text "access granted" which is prompted when users input in the password for this system to the app as I want it to be displayed on the app. Can someone highlight this issue as I'm not that familiar with MIT app inventor,
Much appreciated

#include <Keypad.h>
#include <Servo.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <HardwareSerial.h>
// Define LCD address and pins
#define LCD_ADDRESS 0x27
#define GREENLED_PIN PB5
#define REDLED_PIN PB10
#define SERVO_PIN PA11
#define IRSENSOR_PIN PA12 // IR sensor pin
// Bluetooth module RX and TX pins
HardwareSerial Bluetooth(PA10, PA9);
// Create LCD object
LiquidCrystal_I2C lcd(LCD_ADDRESS, 16, 2);
Servo myServo;
// Define keypad rows and columns
const byte ROWS = 4;
const byte COLS = 3;
// Keypad layout
char keys[ROWS][COLS] = {
{'1', '2', '3'},
{'4', '5', '6'},
{'7', '8', '9'},
{'*', '0', '#'}
};
// Pin connections for keypad
byte rowPins[ROWS] = {PA5, PA6, PA7, PA8};
byte colPins[COLS] = {PC7, PB6, PB4};
// Create keypad object
Keypad keypad = Keypad(makeKeymap(keys), rowPins, colPins, ROWS, COLS);
// Define the correct password
String correctPassword = "28";
String enteredPassword = "";
// Servo control variables
int angle = 0; // Current angle of the servo
int angleIncrement = 60; // Increment angle (60° for 3 compartments)
void setup() {
// Initialize serial communication
Serial.begin(9600);
Bluetooth.begin(9600);
// Initialize the LCD
Wire.begin(PB9, PB8);
lcd.begin(16, 2);
lcd.init();
lcd.backlight();
// Display welcome message
lcd.clear();
lcd.setCursor(3, 0);
lcd.print("Welcome to");
lcd.setCursor(3, 1);
lcd.print("Medspenser");
delay(5000);
// Check for medicine and show the appropriate message
checkMedicineAvailability();
// Initialize LEDs, servo, and IR sensor
pinMode(GREENLED_PIN, OUTPUT);
pinMode(REDLED_PIN, OUTPUT);
pinMode(IRSENSOR_PIN, INPUT);
myServo.attach(SERVO_PIN);
myServo.write(angle); // Start at initial angle
// Turn off LEDs initially
digitalWrite(GREENLED_PIN, LOW);
digitalWrite(REDLED_PIN, LOW);
}
void loop() {
if (digitalRead(IRSENSOR_PIN) == HIGH) {
// Medicine is not available
//Bluetooth.print(mnr); // Send "medicine not ready" status
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Needs to be");
lcd.setCursor(0, 1);
lcd.print("refilled");
delay(3000);
while (digitalRead(IRSENSOR_PIN) == HIGH) {
delay(500); // Delay before checking again
checkMedicineAvailability();
}
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Enter Password:");
}
char key = keypad.getKey();
if (key) {
if (key == '0') {
// Check the entered password
if (enteredPassword == correctPassword) {
rotateServo(); // Rotate servo if the password is correct
} else {
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Wrong password!");
digitalWrite(REDLED_PIN, HIGH); // Indicate error
delay(2000);
digitalWrite(REDLED_PIN, LOW);
resetSystem();
}
} else if (key == '*') {
// Reset input
resetSystem();
} else {
// Append key to password
enteredPassword += key;
lcd.setCursor(0, 1);
lcd.print(enteredPassword);
}
}
}
void checkMedicineAvailability() {
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Checking for");
lcd.setCursor(0, 1);
lcd.print("medicine...");
delay(5000);
if (digitalRead(IRSENSOR_PIN) == HIGH) {
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Medicine is not");
lcd.setCursor(0, 1);
lcd.print("available");
delay(2000);
} else {
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Medicine is");
lcd.setCursor(0, 1);
lcd.print("available");
delay(2000);
resetSystem();
}
}
void rotateServo() {
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Access granted!");
// Increment angle and check if it exceeds 180°
int newAngle = angle + angleIncrement;
if (newAngle <= 180) {
// Rotate to new angle
while (angle < newAngle) {
angle += 1;
myServo.write(angle);
delay(20); // Smooth rotation
}
} else {
// Reset to 0° if angle exceeds 180°
while (angle > 0) {
angle -= 1;
myServo.write(angle);
delay(20);
}
angle = 0;
}
// Indicate success
digitalWrite(GREENLED_PIN, HIGH);
delay(3000);
digitalWrite(GREENLED_PIN, LOW);
resetSystem();
}
void resetSystem() {
enteredPassword = "";
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Enter Password:");
digitalWrite(GREENLED_PIN, LOW);
digitalWrite(REDLED_PIN, LOW);
myServo.write(angle);
}