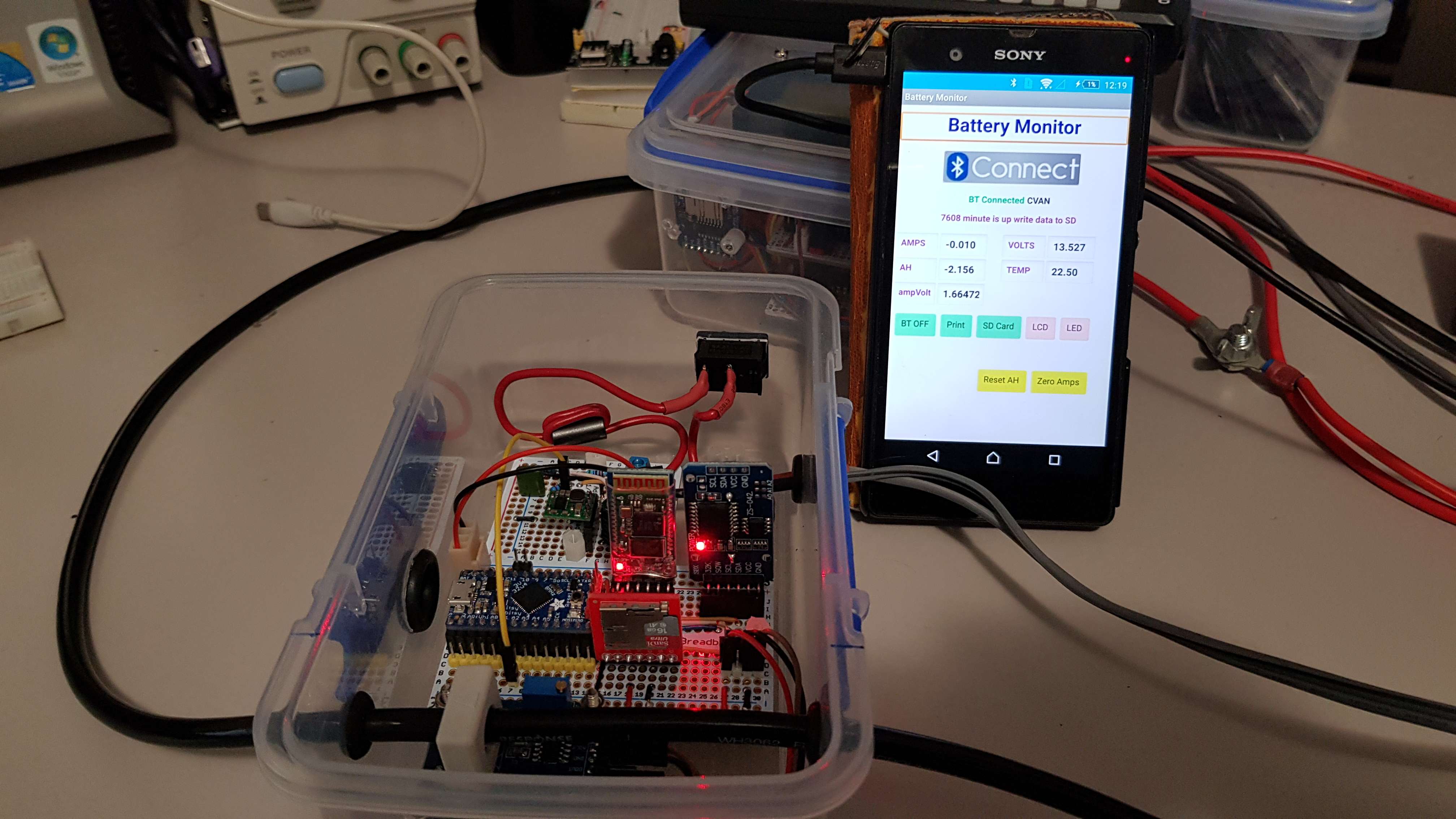
I'm trying to read a long >23 character, comma separated list using BLE from my ItsyBitsy M0.
================================================
void setup() {
Serial1.begin(9600);
}
void loop() {
Serial1.flush();
Serial1.println("12,90,T,Z,N");
delay(5000);
}
=================================================
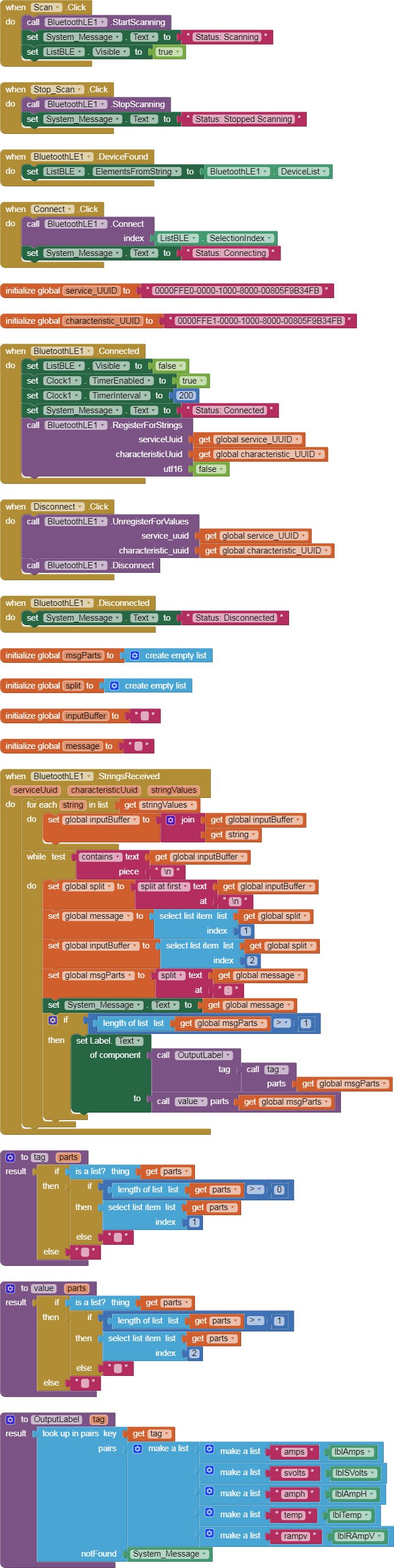
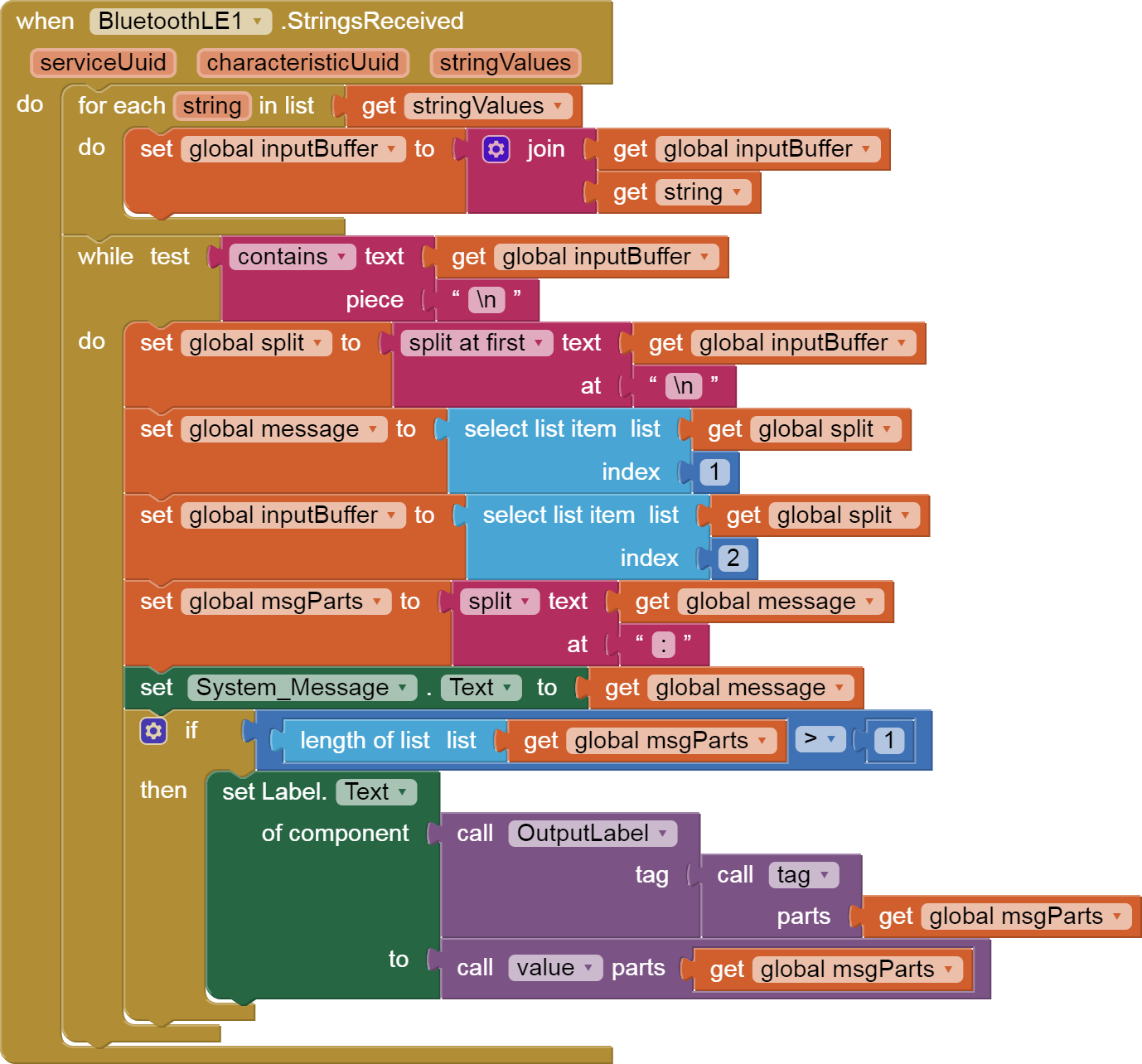
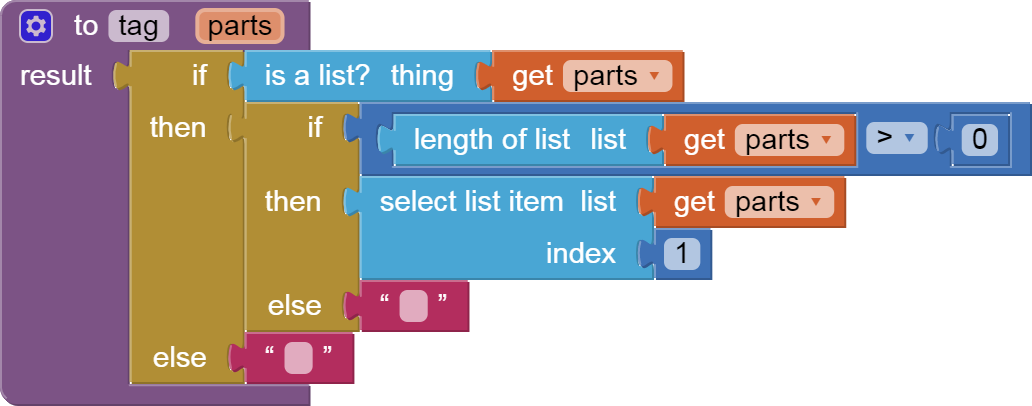
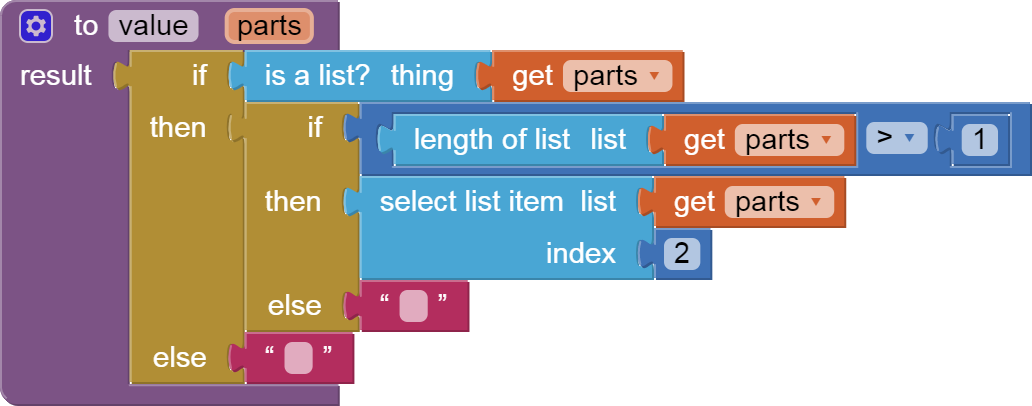
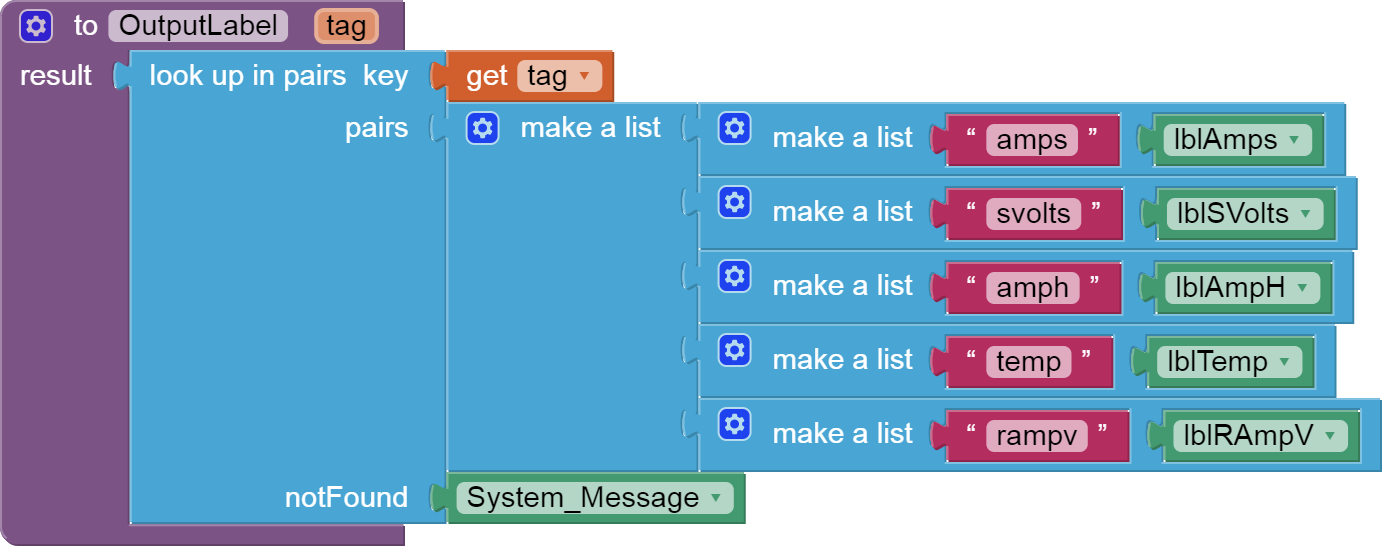
I have also uploaded my MIT-AI2 code to successfully parse this short string into its components. Note that Strings longer than 23 Bytes will fail.
As long as I keep the text string less than 20 odd characters, I can read this data into a
string in MIT-AI2 and easily parse it to extract the 5 fields I am sending up from the ItsyBitsy.
However, when I exceed the 23 Byte BLE MTU limit, all I get is a string with the last 23 characters,
all the leading characters are lost.
Is there any way around this BLE 23 Byte buffer limit to enable longer text strings to be sent by BLE
Bluetooth using serial communication between the ItsyBitsy & MIT-AI2?
There is no problem sending & receiving long text strings with Classic Bluetooth using the .BytesAvailableToReceive block.
BLE_RECEIVE_STRING.aia (179.0 KB)