What I currently have:
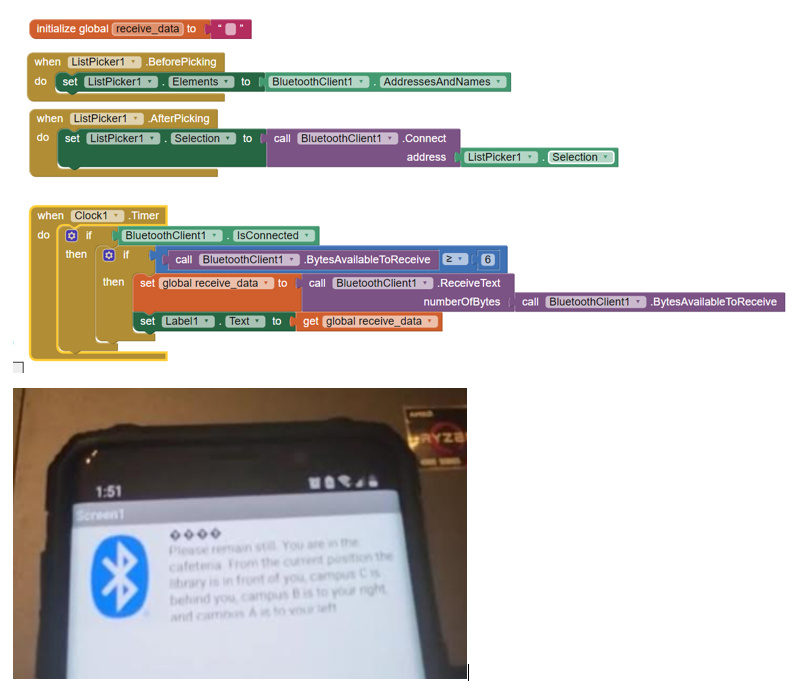
I designed a HMC5883L compass in Arduino that displays directions of locations within a premise (i.e., bathrooms, cafeteria, courtyard, etc..) using app inventor. I simply substituted cardinal directions (north, south, east, west) for these names in the Arduino code of an existing compass code to achieve this. Then I made an app in MIT inventor to display the changing directions as the digital compass is moved. (Please refer to attached info).
What I would like:
I would like to be able to allow the user of the app to edit or replace the "changing" cardinal/location names from the app as needed. Any help would be greatly appreciated. Thank you in advance.
Here is the code for the compass:
#include <Wire.h>
#define I2C_TX write
#define I2C_RX read
// Shift the device assigned slave address (0x3C) for write operation, 1 bit right to compensate for how the TWI library only wants the
// 7 most significant bits (with the high bit padded with 0)
#define HMC5883_WriteAddress 0x1E // i.e 0x3C >> 1
#define HMC5883_ModeRegisterAddress 0x02
#define HMC5883_ContinuousModeCommand (uint8_t)0x00 // cast to uint8_t added to get code to compile under Arduino v1.0
#define HMC5883_DataOutputXMSBAddress 0x03
int regb = 0x01;
int regbdata = 0x40;
int outputData[6];
void setup()
{
Serial.begin(9600);
Wire.begin(); //Initiate the Wire library and join the I2C bus as a master
delay(2000); // wait for disaplay to start
Serial.write(254);
Serial.write(1);
delay(500); // wait for display to clear
}
void loop() {
int x,y,z;
double angle;
delay(500); // Wait for the screen to clear
Serial.write(254);
Serial.write(128); //Goto line-1
Wire.beginTransmission(HMC5883_WriteAddress);
Wire.I2C_TX(regb);
Wire.I2C_TX(regbdata);
Wire.endTransmission();
delay(1000);
Wire.beginTransmission(HMC5883_WriteAddress); //Initiate a transmission with HMC5883 (Write address).
Wire.I2C_TX(HMC5883_ModeRegisterAddress); //Place the Mode Register Address in send-buffer.
Wire.I2C_TX(HMC5883_ContinuousModeCommand); //Place the command for Continuous operation Mode in send-buffer.
Wire.endTransmission(); //Send the send-buffer to HMC5883 and end the I2C transmission.
delay(100);
Wire.beginTransmission(HMC5883_WriteAddress); //Initiate a transmission with HMC5883 (Write address).
Wire.requestFrom(HMC5883_WriteAddress,6); //Request 6 bytes of data from the address specified.
delay(500);
//Read the value of magnetic components X,Y and Z
if(Wire.available() <= 6) // If the number of bytes available for reading is <=6
{
for(int i=0;i<6;i++)
{
outputData[i]=Wire.I2C_RX(); //Store the data in outputData buffer
}
}
x=outputData[0] << 8 | outputData[1]; //Combine MSB and LSB of X Data output register
z=outputData[2] << 8 | outputData[3]; //Combine MSB and LSB of Z Data output register
y=outputData[4] << 8 | outputData[5]; //Combine MSB and LSB of Y Data output register
angle = (double)atan2(y, x); // angle in radians
/*
Refer the following application note for heading calculation.
http://www.ssec.honeywell.com/magnetic/datasheets/lowcost.pdf
atan2(y, x) is the angle in radians between the positive x-axis of a plane and the point
given by the coordinates (x, y) on it.
This sketch does not utilize the magnetic component Z as tilt compensation can not be done without an Accelerometer
----------------->y
|
/
x
N
NW | NE
|
W------+------E
|
SW | SE
S
Most HMC5883 Compass modules have a pointer on the PCB like this:
X Point X towards the North
^
|
|
|
|
Y<-------+
|
Z
*/
// Find your declination angle here: https://www.ngdc.noaa.gov/geomag/declination.shtml
// For example if you Declination is -1° 7' then that's -(1+7/60)*PI/180 in radians=-0.019
float declinationAngle = -0.019;
angle += declinationAngle;
// Correct for when signs are reversed.
if (angle < 0) angle += 2*PI;
// Check for wrap due to addition of declination.
if (angle > 2PI) angle -= 2PI;
// Convert radians to degrees for readability.
float bearing = angle * 180/PI;
Serial.write(254);
Serial.write(192); //Goto line 2
//Print the approximate direction
Serial.print("\nPlease remain still. You are in the cafeteria. From the current position ");//this is the cafeteria tag
if((bearing > 337.5) || (bearing < 22.5)) Serial.print("campus C is in front of you, the library is behind you, campus A is to your right, and campus B is to your left");//facing north
if((bearing > 22.5) && (bearing < 67.5 )) Serial.print("campus C is in front of you, the library is behind you, campus A is to your right, and campus B is to your left");//facing north
if((bearing > 67.5) && (bearing < 112.5 )) Serial.print("campus A is in front of you, campus B is behind you, the library is to your right, and campus C is to your left");//facing east
if((bearing > 112.5) && (bearing < 157.5 )) Serial.print("the library is in front of you, campus C is behind you, campus B is to your right, and campus A is to your left");//facing south
if((bearing > 157.5) && (bearing < 202.5 )) Serial.print("the library is in front of you, campus C is behind you, campus B is to your right, and campus A is to your left");//facing south
if((bearing > 202.5) && (bearing < 247.5 )) Serial.print("the library is in front of you, campus C is behind you, campus B is to your right, and campus A is to your left");//facing south
if((bearing > 247.5) && (bearing < 292.5 )) Serial.print("campus B is in front of you, campus A is behind you, campus C is to your right, and the library is to your left");//facing west
if((bearing > 292.5) && (bearing < 337.5 )) Serial.print("campus C is in front of you, the library is behind you, campus A is to your right, and campus B is to your left");//facing north
delay(5000);
}