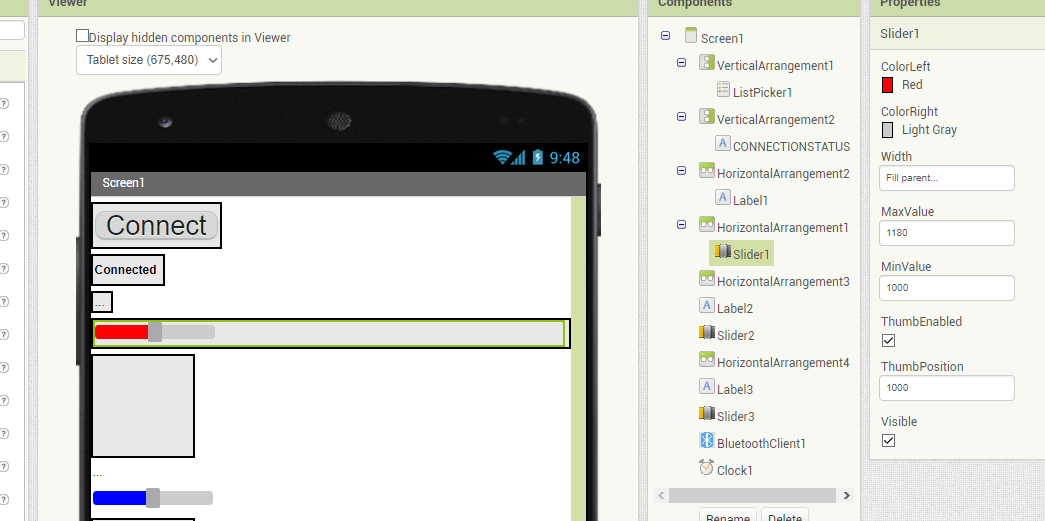
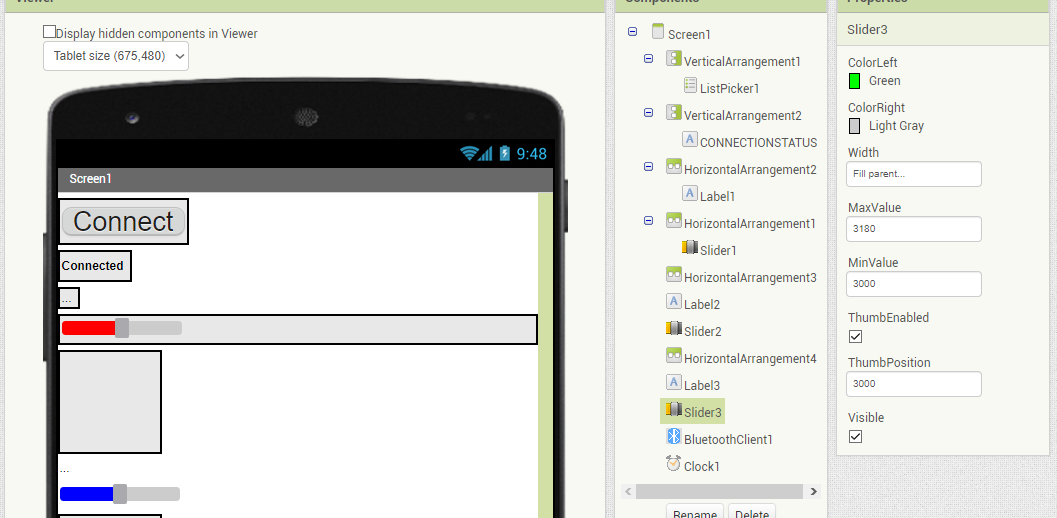
so i am making a project including 3 servos controlled via bluetooth(HC-05) and there is this bit of code i dont understand
heres the entire code;
#include <SoftwareSerial.h>
#include <Servo.h>
Servo myservo1, myservo2, myservo3;
int bluetoothTx = 0;
int bluetoothRx = 1;
SoftwareSerial bluetooth(bluetoothTx, bluetoothRx);
void setup()
{
myservo1.attach(9);
myservo2.attach(10);
myservo3.attach(11);
//Setup usb serial connection to computer
Serial.begin(9600);
//Setup Bluetooth serial connection to android
bluetooth.begin(9600);
}
void loop()
{
//Read from bluetooth and write to usb serial
if(bluetooth.available()>= 2 )
{
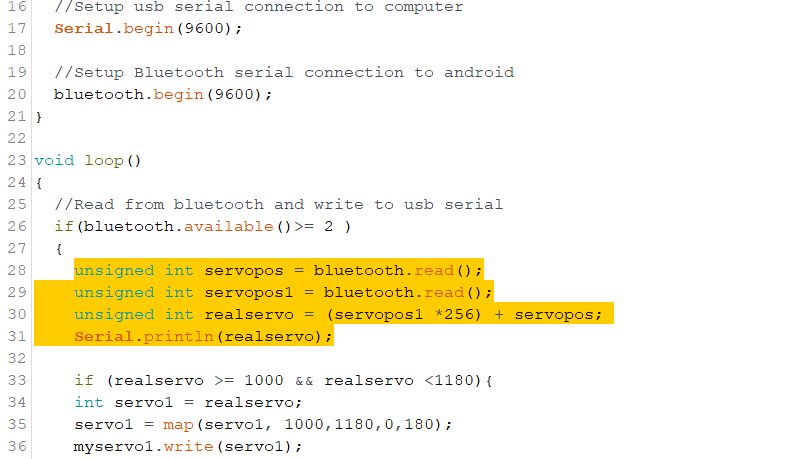
unsigned int servopos = bluetooth.read();
unsigned int servopos1 = bluetooth.read();
unsigned int realservo = (servopos1 *256) + servopos;
Serial.println(realservo);
if (realservo >= 1000 && realservo <1180){
int servo1 = realservo;
servo1 = map(servo1, 1000,1180,0,180);
myservo1.write(servo1);
delay(10);
}
if (realservo >=2000 && realservo <2180){
int servo2 = realservo;
servo2 = map(servo2,2000,2180,0,180);
myservo2.write(servo2);
delay(10);
}
if (realservo >=3000 && realservo < 3180){
int servo3 = realservo;
servo3 = map(servo3, 3000, 3180,0,180);
myservo3.write(servo3);
delay(10);
}
}
}