Hi.. I'm currently working on my school project, the instructions are as follows:
Robot must use a Bluetooth connection to a mobile phone to track to movement of the robot on the track.
Also include an 2 buttons for stop and start button.
i managed to design a robot with 2 motors and it does follow a black line, my problem is controlling it by a mobile phone.For now i just want to be able to control it by 2 buttons for STOP and FORWARD
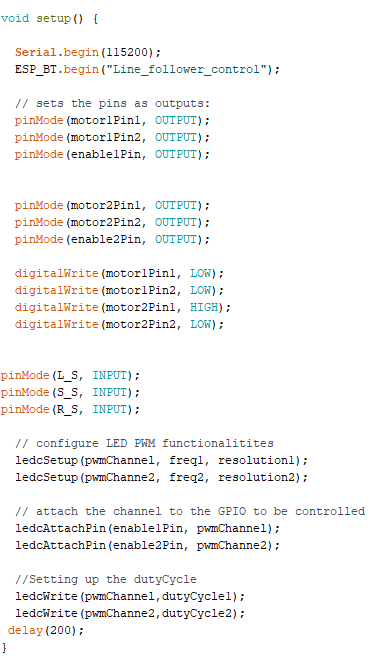
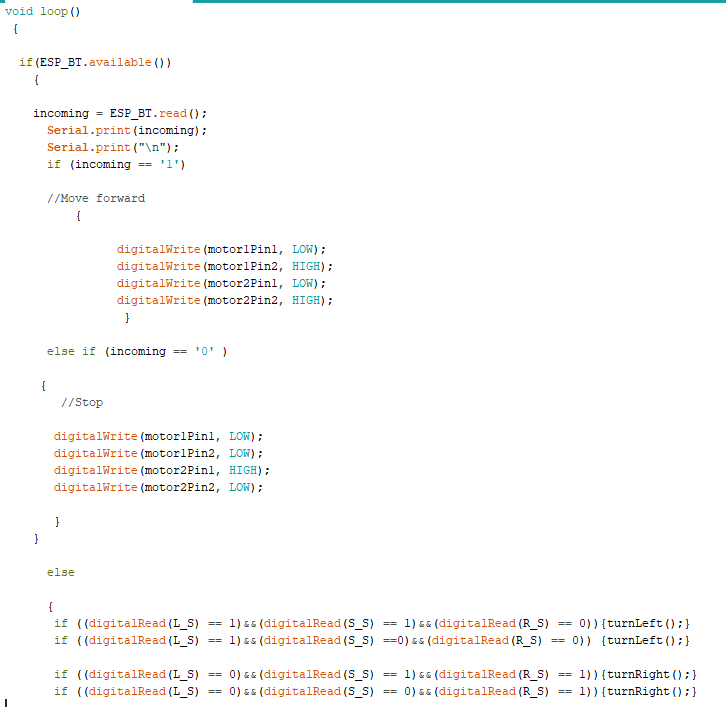
the following is a code and MIT app inventor code.Please assist.
Hi @Char3les,
maybe you have already checked, but on the serial monitor what do you see when you press a button on your app ?
Second hint is: incoming should be char not int.
Give it a sight
Ciao.