Hi Ugo!
Oh okay, i did not even know!
Great I will look into the software that you advise me!
I'm not very expert, but myself I didn't add a capacitor in my project (there is on the cnc shield, but it may have nothing to do with it).
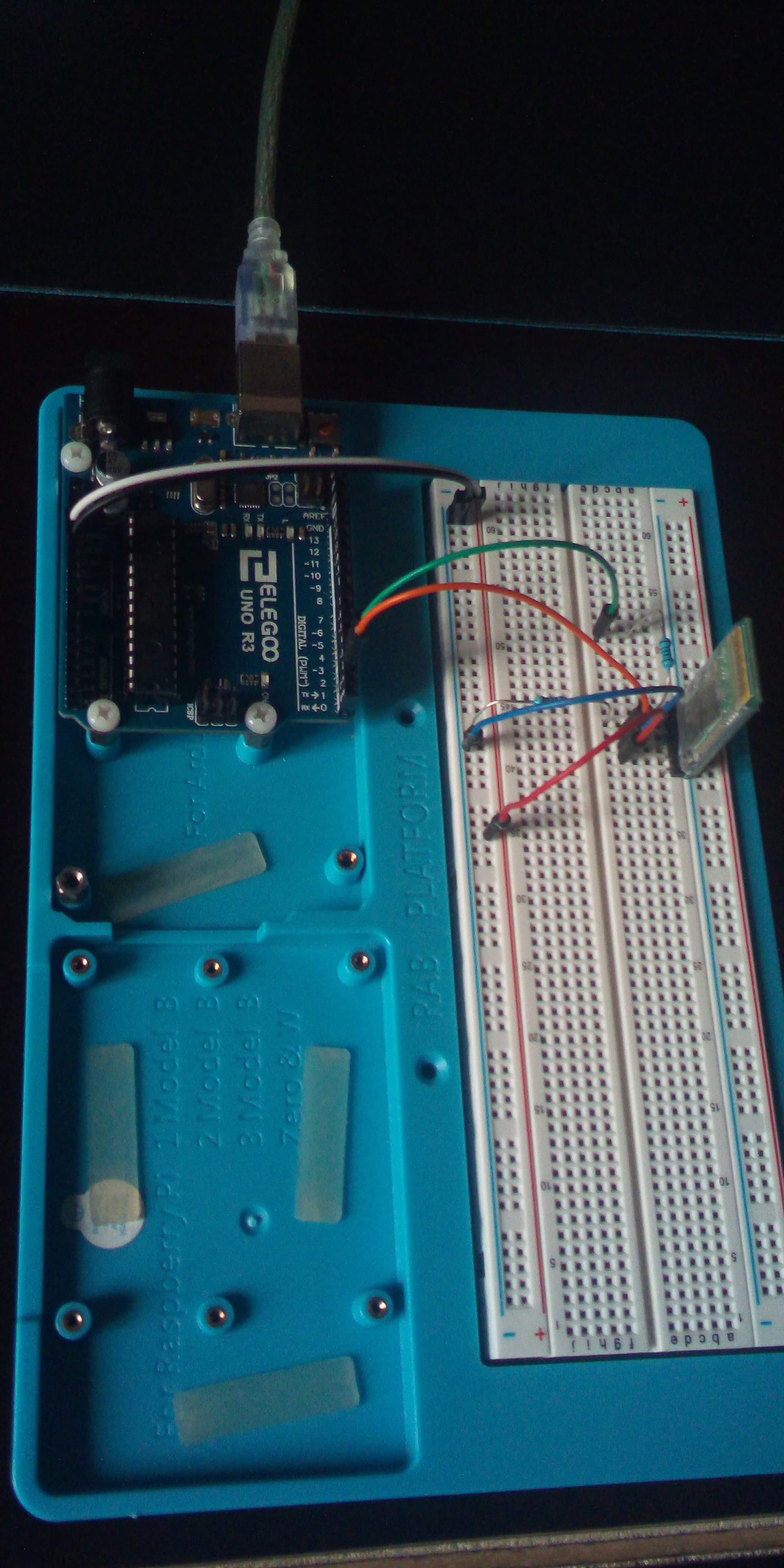
At the beginning of the project, I had a problem with the GND on my breadbord. I believe that when I touched the GND on my joystick, it made the motors move. ![]()
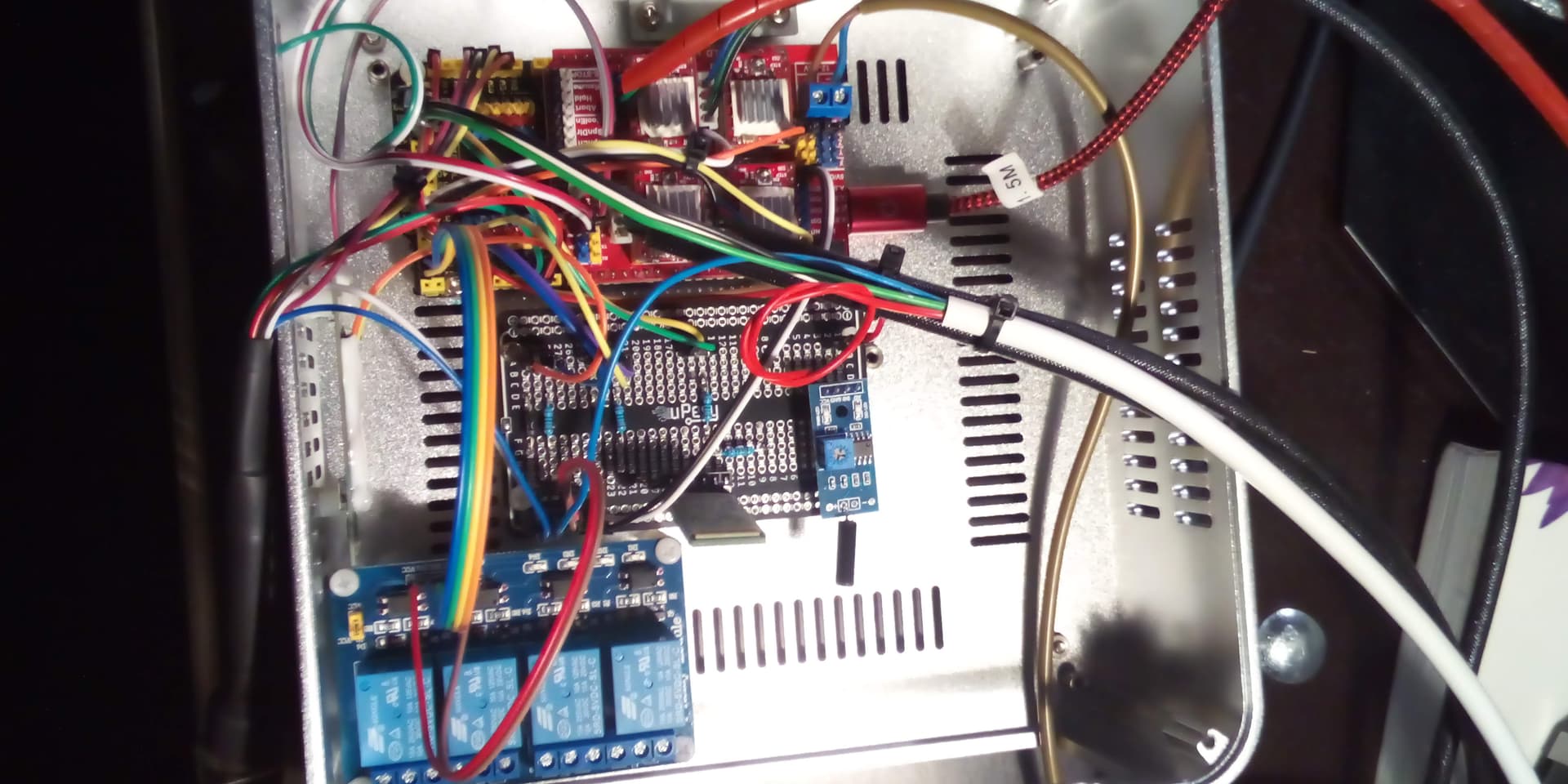
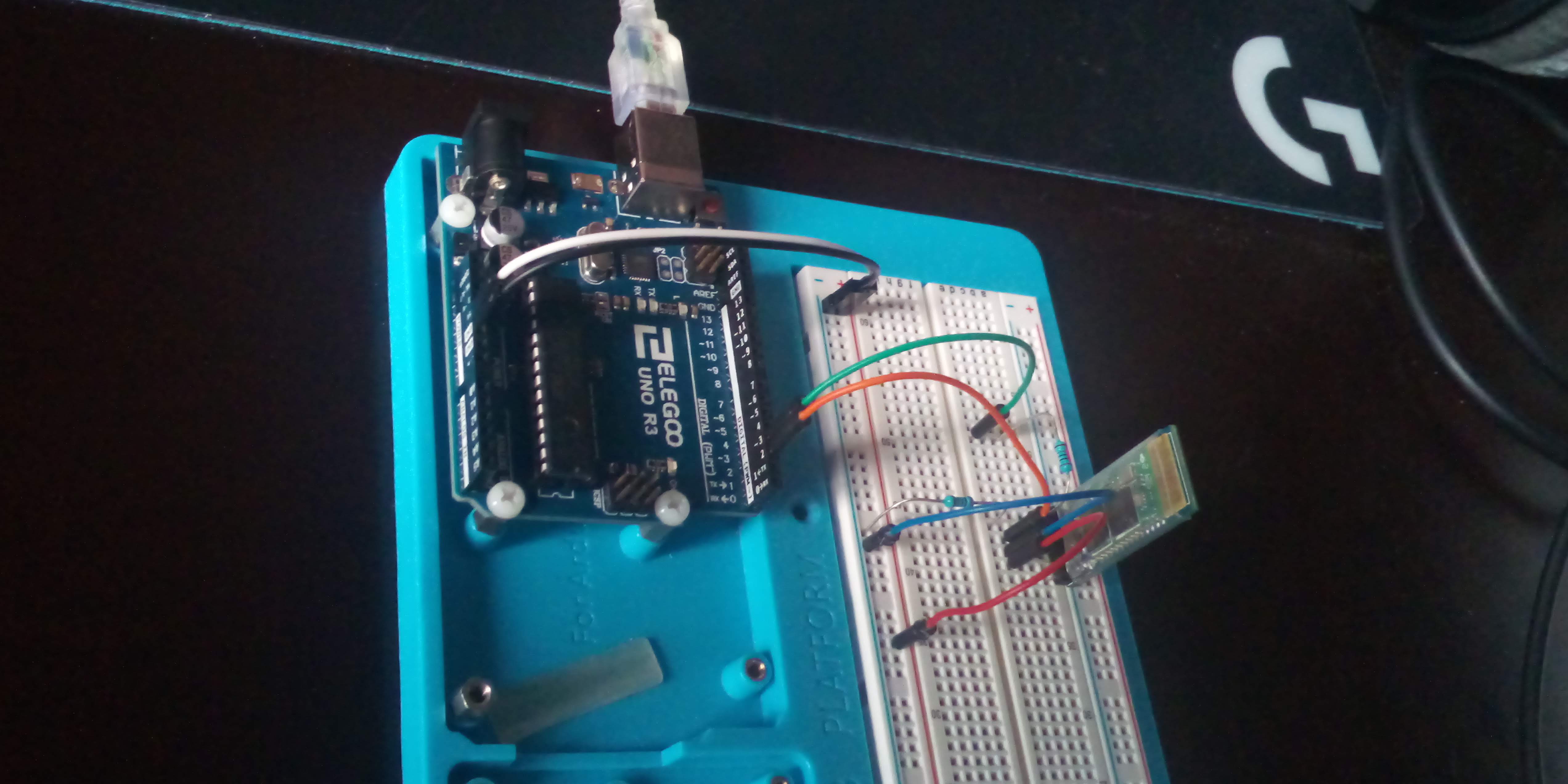
You're right ! it's a forest of cables!!
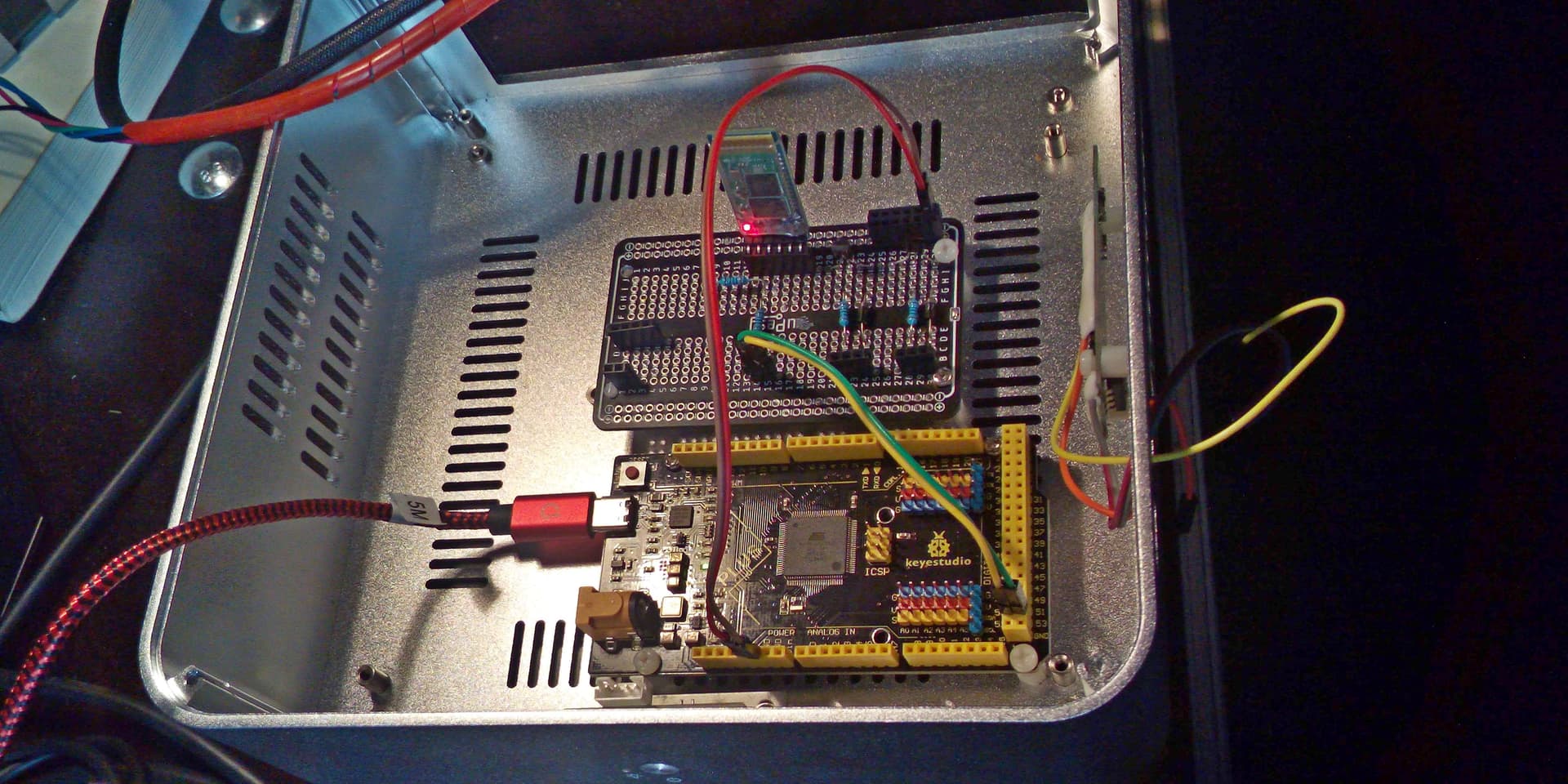
I hadn't gotten too interested in storage yet. I intended to "tidy up" once the project was finished, in order to be able to close the case.
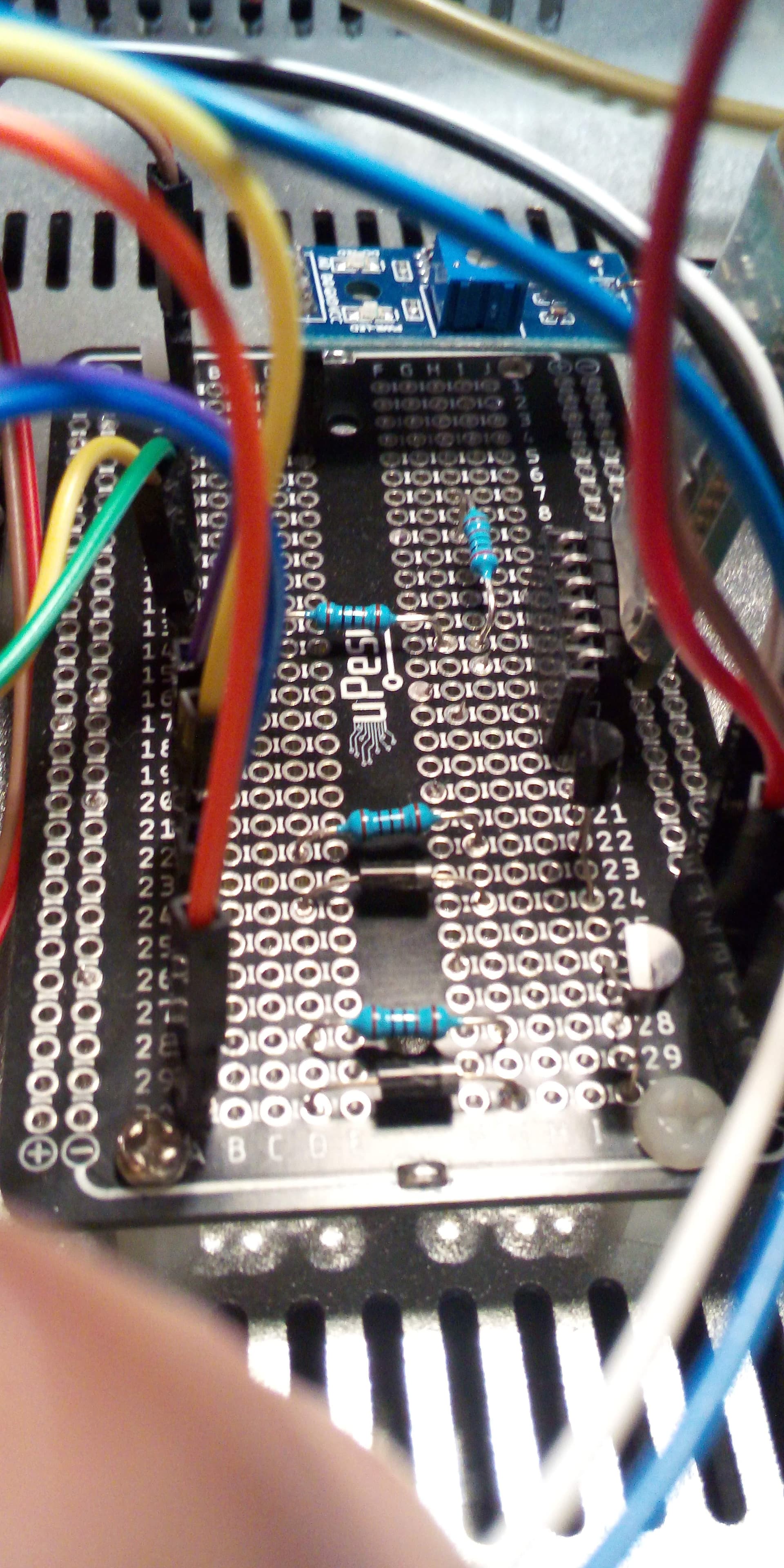
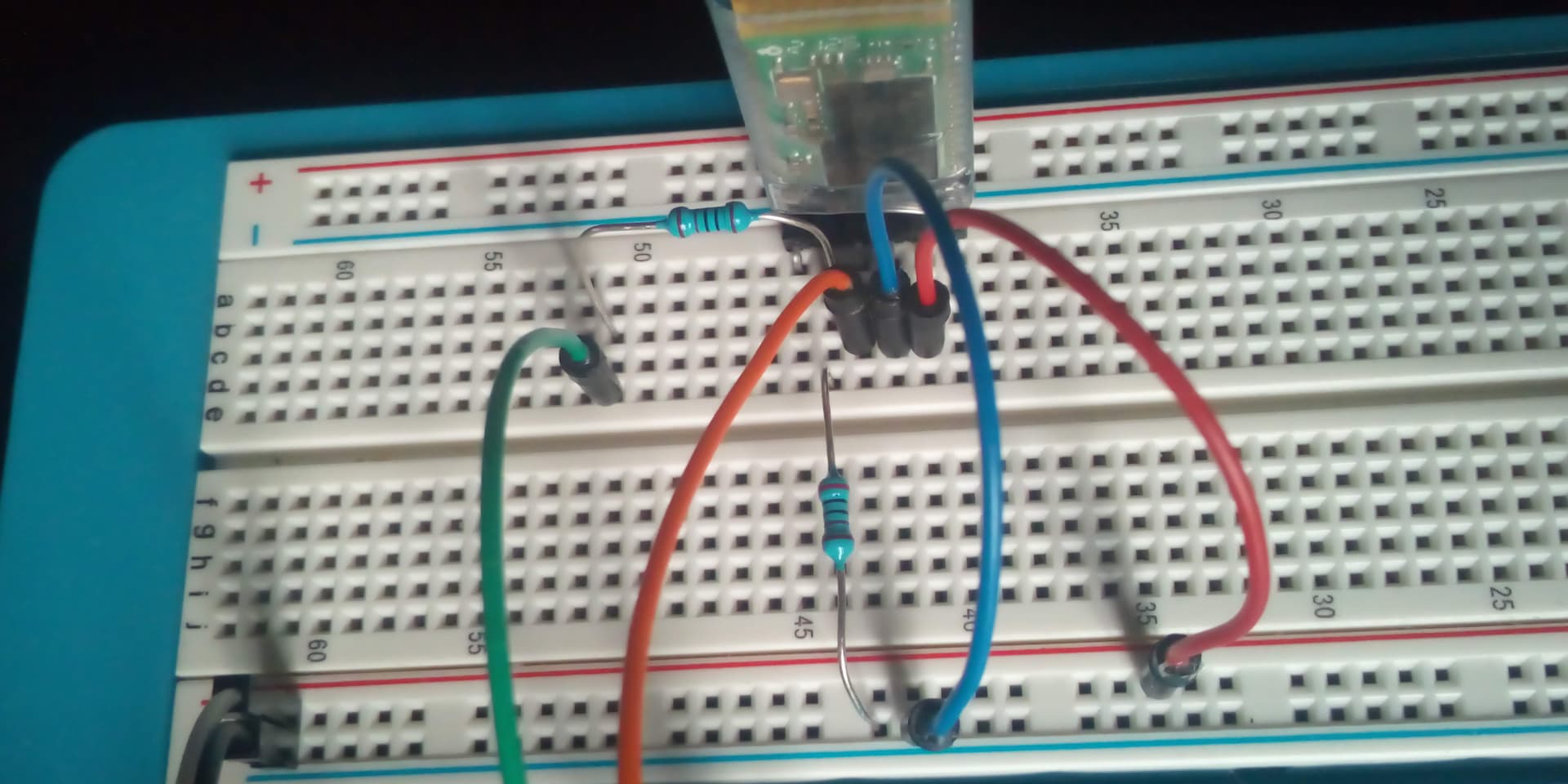
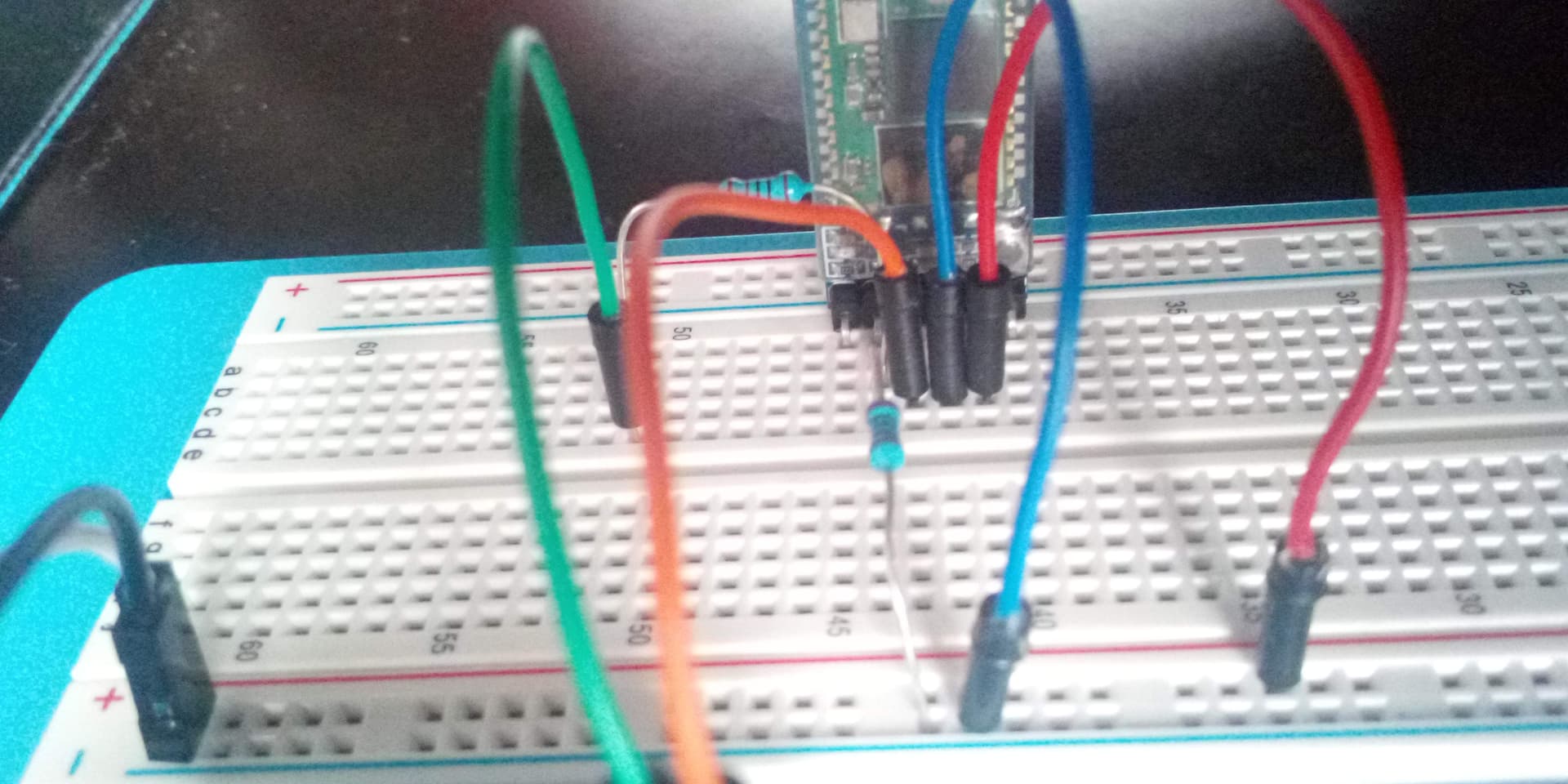
I tried to "clean up" a bit (if I assure you!):
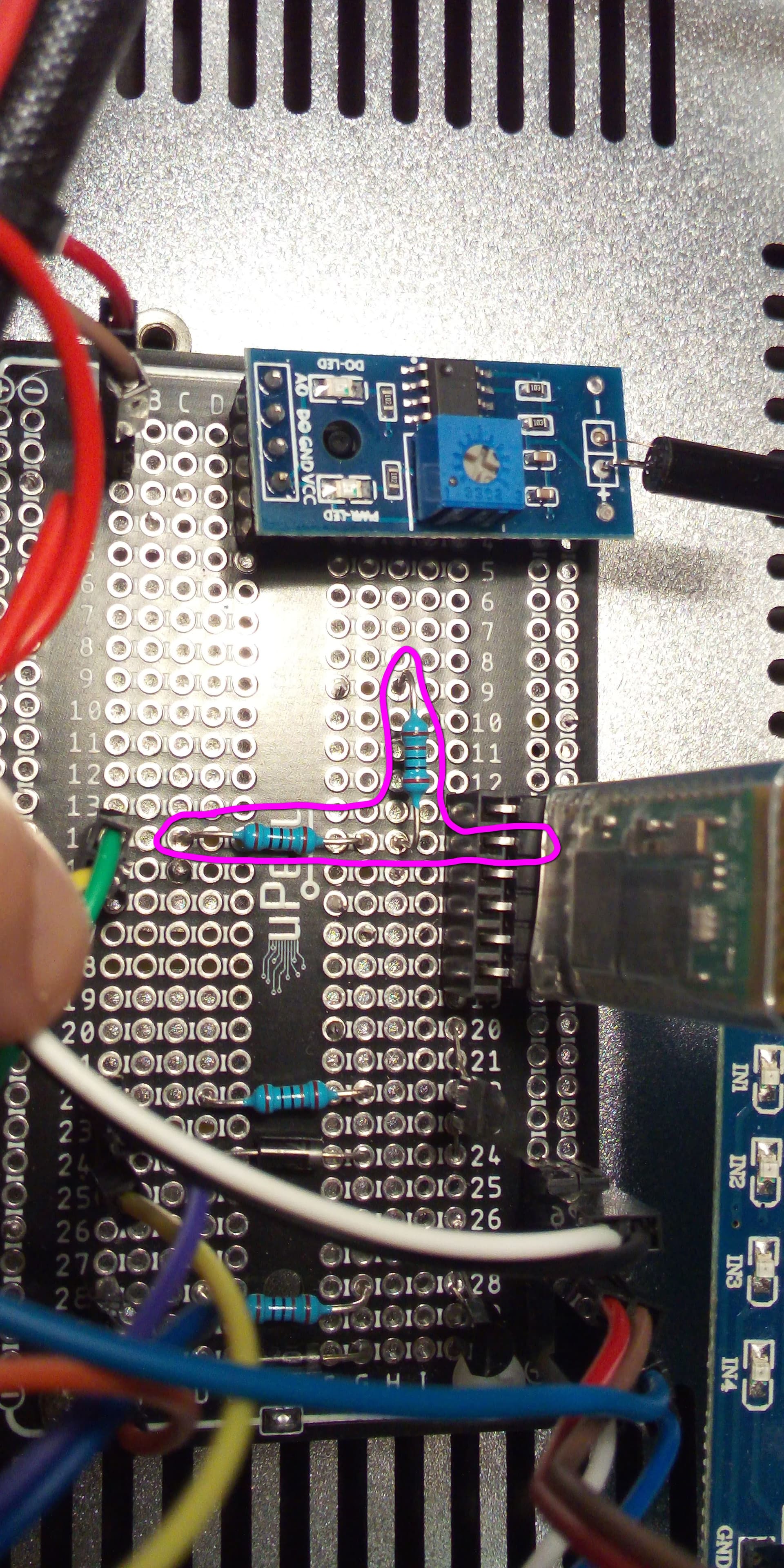
HC-05 =
EN: Not connected
VCC: 5V on the shield CNC
GND: ground on the shield CNC
TX: on Ardunio pine
RX: voltage divider bridge, then pin on Arduino
STATUS: Not connected
Uploading: 2.jpg...
A question after your answer:
If I understood correctly, when you set a speed on the HC-05 (e.g. 9600 baud), it will be the "transmission" speed between Arduino -> HC-05 (in the other direction too?).
But what is the transmission speed between the HC-05 and my tablet?
Thanks Ugo!
PS : Bonne année (avec un peut d'avance! ![]() )
)
 ).
).









 , I only have to send the position of the motors when they are moving, and therefore when they are stopped, send nothing, and the HC-05 would be free to receive something.
, I only have to send the position of the motors when they are moving, and therefore when they are stopped, send nothing, and the HC-05 would be free to receive something.