3D printed?
Yes
So we should be able to determine how robust it is with some decent images - from CAD?
If you want someone to study your Arduino Sketch, upload the .ino file
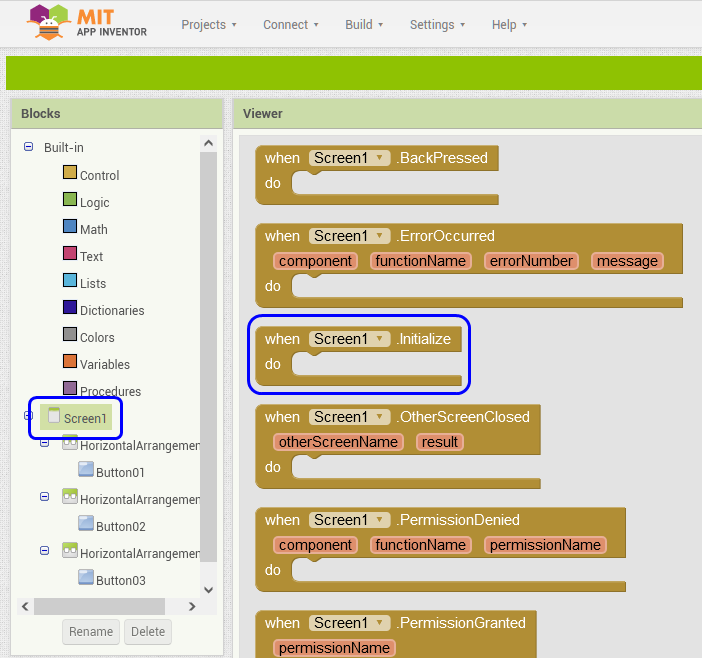
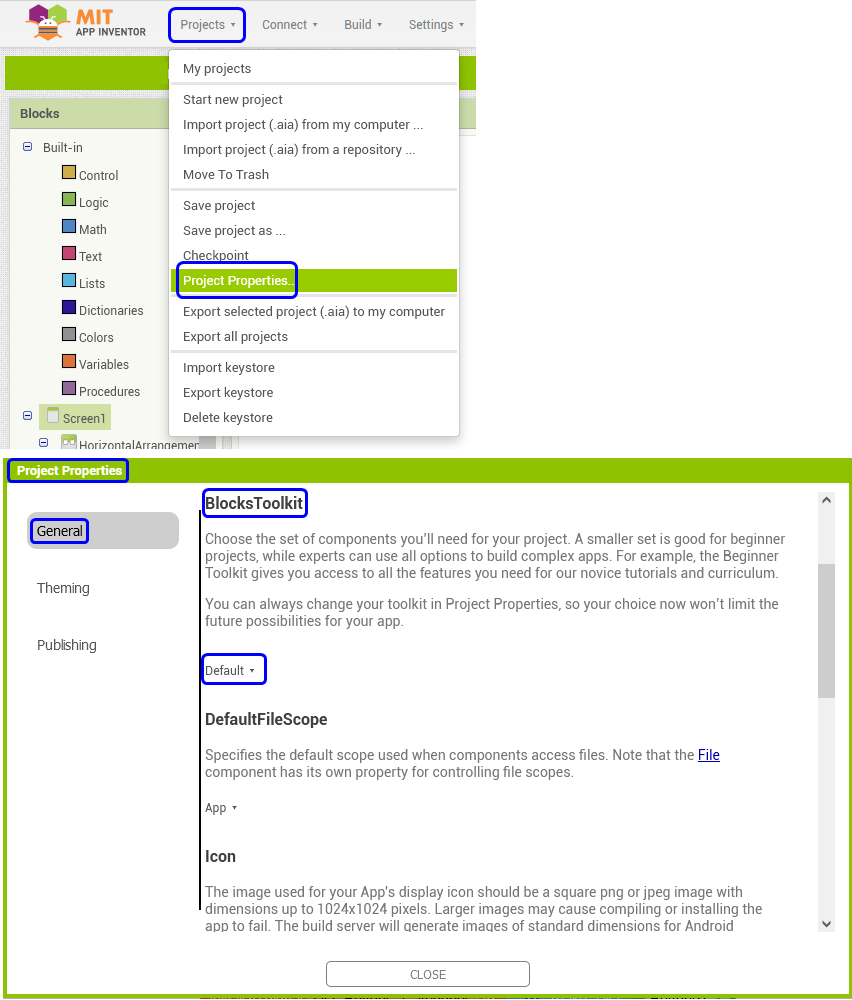
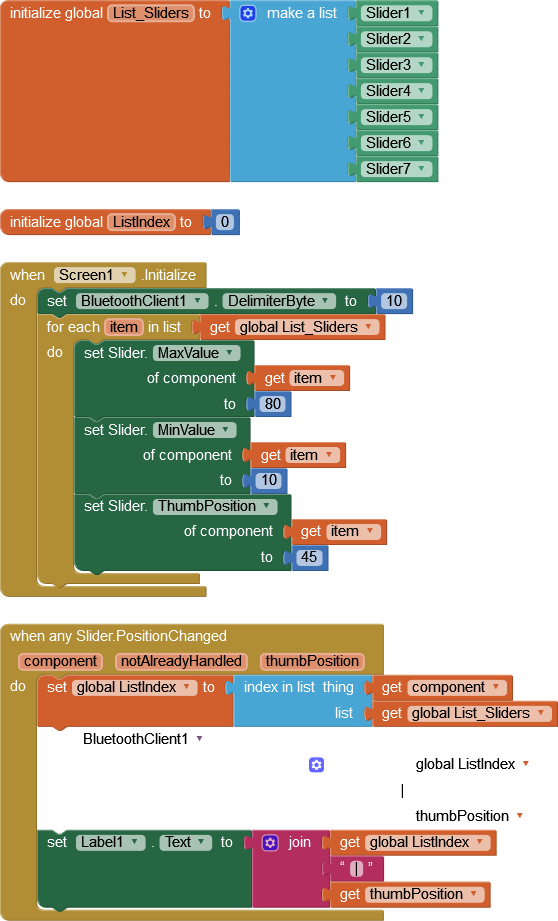
A part of the smoothness of action will be determined by the sliders - make them as wide as possible, say 98%. You don't need individual blocks for each slider:
SliderBlocks.aia (2.9 KB)
14.1.versuch.ino (17.6 KB)
Thank you!
I think the most likely reason for the "jitters" and over heating is that the servos are not powerful enough. Can't really tell from your video but I imagine the arm parts could be made lighter, without compromising their strength, by drilling holes along their length (along the centerline).


..... you can of course test to see if the arm assembly causes the twitching by removing a servo and fastening it to a solid base - run the App as though it were part of the assembly.
Instead:
dataIn = Bluetooth.readString();
i would do:
dataIn = Bluetooth.readStringUntil('\n');
try this:
14.1.versuch.ino (17.7 KB)
1 Like
Roboter_Arm__copy.aia (418.9 KB)
I have now edited the app. Is it correct with the "setsliders"?
Do I need to add anything to the arduino code to ensure the app works as it is currently programmed?
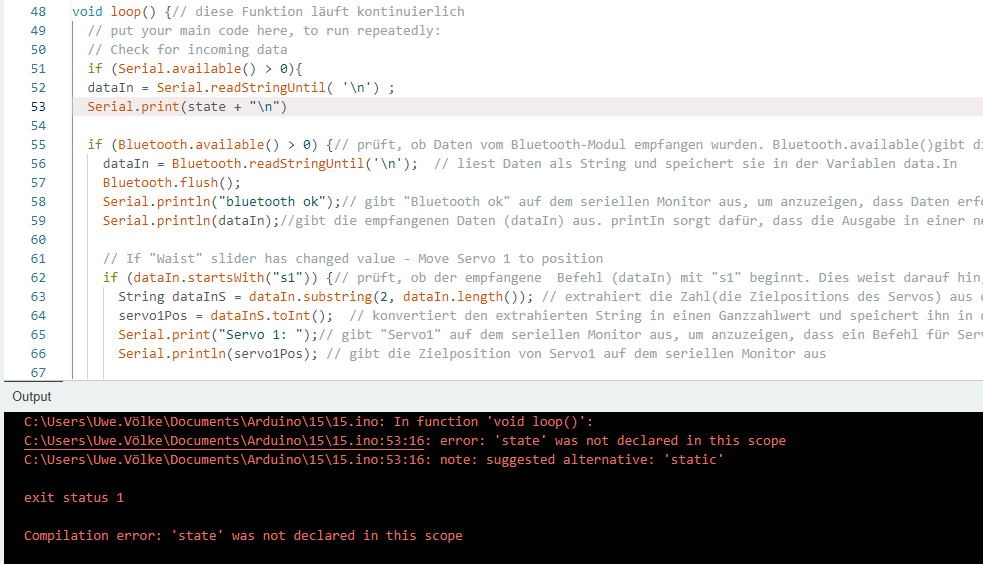
Remove line 53. Since variable state is not declared in your code. This line is not needed.
Besides, why are you reading values from Serial? It seems to me that this code regarding Serial is incorrect. Did you copy it from somewhere?
Try this:
14.1.versuch.ino (17.6 KB)
1 Like
I have now tested both new codes in combination, and unfortunately, it still twitches, and not every movement of the sliders is executed by the robot. At one point, it also performed the movement with a significant delay. Additionally, it randomly changed the speed of the servos. For instance, one of the servos suddenly moved very quickly, even though I didn’t set it that way. Interestingly, it moved very smoothly, which I found quite impressive because servos usually move rather jerkily and slowly. I recorded this on video, but the most important sequences are still too large to upload. I will try to compress the videos further tomorrow so I can upload them.
It seems to me that the jumping is caused by cyclical sending of values. For example 10, 20, 30, 40 etc., between the values there is a jerk. Fast, smooth movement is when you send 40 immediately, without intermediate values.
1 Like
Do everything you can to lighten the load. Concerning your videos, you can send them via WeTransfer to me prof@professorcad.co.uk
Thank you. I sent you some videos. One shows a servo running a sketch from the Arduino IDE to test if they are all working. The other videos show the last code that was sent here, as well as the last code for MIT App Inventor.
The arms do look like they are not really free to move but I assume they can.
In 20250115_194757.mp4 we can clearly see that the lowest arm base is shaking on the main (white) base. That is absorbing some of the momentum. If the arms are free to move and you can move them freely then I think they are too heavy for the servos and possibly the servos do not receive enough power.
I think Patryk_F should see these videos if he has time.
Your servos are but in general they do not - hence their use on CNC machines for example. Some DIY robots use steppers instead, as do 3D Printers. At the end of the day it's mostly about cost - you can get a better stepper for less money than a servo.
There is something wrong with the upload and it doesn't want to open in App Inventor ![]()
Edit: In fact it is being identified as a browser file. If you rename a .aia file, do so with App Inventor, not 'outside'.