Taifun
2
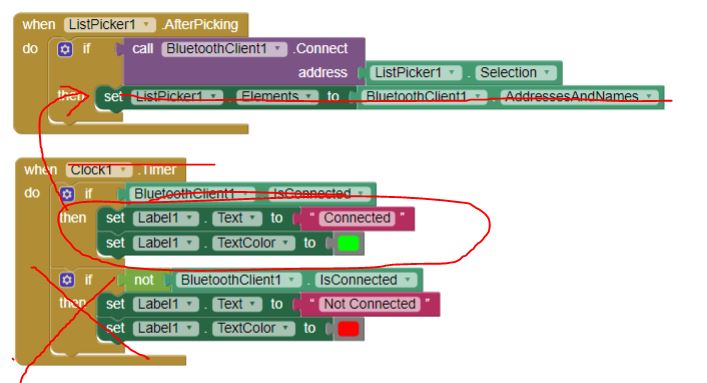
yes... the clock compnent does not make sense, see also
are you able to connect after starting the app?
which device and Android version are you using for your tests?
Taifun
Trying to push the limits! Snippets, Tutorials and Extensions from Pura Vida Apps by  Taifun.
Taifun.