Dear @Jon1,
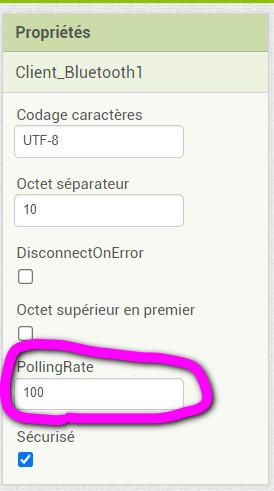
the baudrate betwen HC0x and Arduino board is the same for both Tx and Rx always. That is: if you set 9600 baud, this speed applies to both directions. In my knowledge any UART (Universal Asynchronous Receiver and Transmitter) works always with the same speed in Tx and Rx.
The HC05 isn't a BLE device, but also newest Pads (I'm using in my latest applications some LENOVO M8 3rd Gen) can work with both LE and standard BT's. So if your app uses the standard BTclient blocks, without the need of specific extensions, it should work fine (I never used extensions for my BT app's). You can have a look to my .aia annexed: this code works in conjunction with an ELM327 to connect a diagnostic port of my car. Also in this case the BT is a standard one.
CAN_207_GPS1_23112022.aia (3.9 MB)
Maybe is a bit complicated but if you have time, try to give it a sight.
Though, I'm roughly convinced that the problem could be a HW one (have you the possibility to use another HC05 ?) due to its randomicity.
Ciao ciao, Ugo.
 ).
).









 , I only have to send the position of the motors when they are moving, and therefore when they are stopped, send nothing, and the HC-05 would be free to receive something.
, I only have to send the position of the motors when they are moving, and therefore when they are stopped, send nothing, and the HC-05 would be free to receive something.