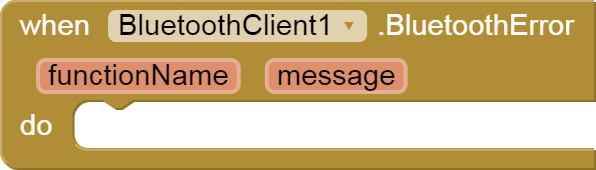
Here are two blocks you can drag into your Blocks Workspace to address errors ...
I left them empty (blithe) to ignore errors.
A more scrupulous approach would be to have them log errors. Sample logging procedures: